水下機器人為我們拉開了「遠程臨場」時代的大幕。
坐在距離海底世界千里之遙的「書獃子探險者」,可以身臨其境般看到「泰坦尼克」號沉船和加拉帕格斯群島的海底熱液。
我所在的位置是一艘潛艇的內部。狹窄的船艙看上去既像民航飛機客艙,又像20世紀50年代的野營車車廂。儘管當時已經是1997年了,但是隨處可見的各種開關、不停閃爍的電子元件、形形色色的把手及手柄、綠色油漆、亞麻油氈和不銹鋼器具,卻讓我彷彿置身於「冷戰」時期的火車餐車。不絕於耳的呼嘯聲提醒我,這裡的空氣都來自一台機器。
10名海軍船員相互間不停地口述各種指令與技術術語,(「塞拉,我是維克多,請停止前進!」)這樣的場景與飛機駕駛艙內非常相似。兩名潛艇駕駛員的座椅也同飛行員的座椅一樣,都面向前方,駕駛員在左側,副駕駛員在右側。潛艇內部空間狹小,潛艇艇長的床鋪就在駕駛員座椅後面的地板上。艇長正在睡覺,我站在他的床鋪旁邊,視線越過駕駛員,朝前方看去。
除了我以外,這艘美國海軍「NR–1」號潛艇及其母船「Carolyn Chouest」號上還載有一些工程師、海洋學家和考古學家。我們正在向地中海進發,去執行打撈沉船的探險工作。「NR–1」號是「冷戰」時期美國與蘇聯對抗的產物,當時主要負責執行一些秘密任務,現在則用於民事科考活動。20世紀60年代,人們為了研究小型核潛艇的製造方法,試制了這艘45米長、可以長時間下潛的潛艇。20世紀80年代,「挑戰者」號航天飛機失事墜海之後,「NR–1」號成功地打撈出了一些殘骸。
我們在第勒尼安海中搜索勘查的這種地質結構叫作「謝爾克暗礁」,位於西西里島西北方向,距該島約70海里。從表面來看,謝爾克暗礁附近的水域沒有任何異常,但水面之下暗藏兩塊巨大的巖礁。這處凶險的地形位於迦太基(今突尼斯)和古羅馬奧斯蒂亞港之間的主航道上,導致在古代這裡麻煩不斷,眾多經過這裡的商船都難逃船體受損甚至沉沒的厄運。
一天,我負責控制「NR–1」號潛艇執行搜尋這些沉船殘骸的任務。幾個小時之前,我和羅勃·巴拉德坐在母船上制訂了探索計劃。巴拉德是整個探險活動的首席科學家和總設計師,是海難事故搜救方面的專家,因為發現「泰坦尼克」號遺骸而享有盛名。經過商討,我們設計了好多條明確、有規律的航跡線,為「NR–1」號搜索廣闊海域做好了安排。巴拉德告誡我:「一定要按照這些航跡線搜索,對聲吶發現的目標要有所取捨,否則你不可能完成搜索任務。」
制訂了搜索計劃之後,我登上潛艇。這艘潛艇的黑色船體僅比水面高出幾米。在船體的上部,有一個一人高的鮮紅色的瞭望塔。我進入瞭望塔側面的一扇門,然後沿著一架很窄的梯子向下爬,來到潛艇內部。一名船員隨即關上了艙門。幾天之後我才能走出這扇門,因此我有一種與世隔絕的感覺。我站在那兒,看著身邊的船員做下潛準備。在一系列檢查、呼叫、通信之後,船員們開始轉動幾個手搖式閥門,潛艇便以一個舒緩的坡度緩緩下潛。
我的床舖位於狹窄走廊的上方,周圍都是管道和托架,只在床尾有一個很小的開口。睡覺前,我要從這個開口處爬到床上,躺到合適的位置,然後就無法轉身了。我仰臥在那裡,眼前是一束管線,再往上幾厘米就是潛艇的船體。在這塊鋼板的另一側,則是900米深的海水。第一天晚上,我從睡夢中醒來,感覺胸口憋悶。於是,我爬下床鋪,四處走動,讓自己放鬆下來。第二天晚上,我身體難受的程度略有緩解,但還有心理陰影。到了第三天晚上,我已經完全適應了。
在下潛一段時間之後,我們到達了900米深的海底。我們把潛艇停在謝爾克暗礁外側,然後開始搜尋沉船殘骸的線索。「NR–1」號的兩側有「側掃瞄」聲吶,探測範圍為船體兩側幾百米。但是,在「NR–1」號上發揮主要作用的還是前視聲吶。每過一兩秒鐘,位於潛艇船頭的前視聲吶就會朝前方水域發出高頻聲波脈衝信號,然後收集回波信號並顯示在電腦屏幕上。安裝在「NR–1」號上的這台聲吶可以探測到2 700米以外的易拉罐(我們在地中海海底發現了不少易拉罐)。
問題是,聲吶只能以模糊的斑點像素的形式顯示「目標」。要弄清楚這些斑點到底是什麼,船員必須不辭辛勞地駕駛潛艇來到目標上方,透過窗戶或者借助「NR–1」號上安裝的多個攝像頭近距離觀察目標。由於「NR–1」號潛艇的航行速度非常慢,在海底只能以一兩節(1節≒每小時1.8千米)的速度前進,與人的步速相仿。如果聲吶探測到2 700米之外的某個目標,駕駛潛艇到達目標所在地點可能需要一兩個小時的時間。
下潛了一個小時之後,艇上的導航員兼聲吶手斯科特上尉在聲吶圖像上發現了目標。這個目標只有幾個像素大,但是斯科特認為這可能是一個人造物品。斑點的中心密度大,周圍的密度小,好像被一個光環包圍著。這與岩石的聲吶圖像有所不同。當我們從目標上方經過時,聲吶的入射余角發生著變化,但是斑點的位置與外觀卻沒有變化,這個特徵再次表明它是一個實實在在的物體,而且很有可能是人類遺留在這兒的。斯科特建議我們離開現在的航跡線,靠近這個目標。
他的這個建議是對我的領導能力的一次檢驗。當時,我們原計劃兩天完成的探險活動才剛剛開始。而且就在一兩個小時之前,巴拉德還告誡我們不得偏離航跡線。但是,我必須信任這些船員。如果這次偏離航跡線的舉動最終一無所獲,將來我就有拒絕類似建議的理由了。
我來到「NR–1」號的觀察區。這個狹小的艙室位於潛艇底部,有幾扇小窗戶。我們正在距離海底12米深的地方悠閒地前行。在「NR–1」號的綠色燈光照射下,我看到窗外呈現出一片綠色。我瞇著眼睛仔細辨認,才能看見海底的沙子。只在微波蕩漾或者一塊岩石從眼前滑過,打破這片單調的綠色時,我們才能感覺到潛艇正在行進。離神秘目標越來越近了,我也做好了看到一堆岩石的心理準備。
但讓我震驚不已的是,透過那片綠色我看到了100多個古代陶瓷罐。陶瓷罐散落海底,明顯分成兩堆,彼此間距約10米。這表明,在古代,這裡發生過海難。很久之前,木質船體就腐爛殆盡了,而貨物則留在這裡,還能依稀看出它們當時堆放在船上的景象。兩隻鉛質船錨被海水腐蝕後形成的鉛堆,清楚地告訴我們船首所在的位置。兩千多年前船沉沒之後,沒有人發現這些殘骸,更沒有人動過它們。作為最先目睹這些殘骸的人,歷經悠悠歲月最終出現在我們眼前的這些有形物體,令我感到無比震撼。
這是謝爾克暗礁附近的第4個已知海難地點,我按照一種比較科學的方式,把它命名為「謝爾克4號」。通過水下電話,我們把這個發現報告給水面上的同事。水下電話是一種很不穩定的通信方式,音質粗糙,即使效果好的時候,通話聲音聽起來也像是從一台老舊的手持式對講機裡發出的。我們小心翼翼地標注了位置,還拍攝了大量照片。
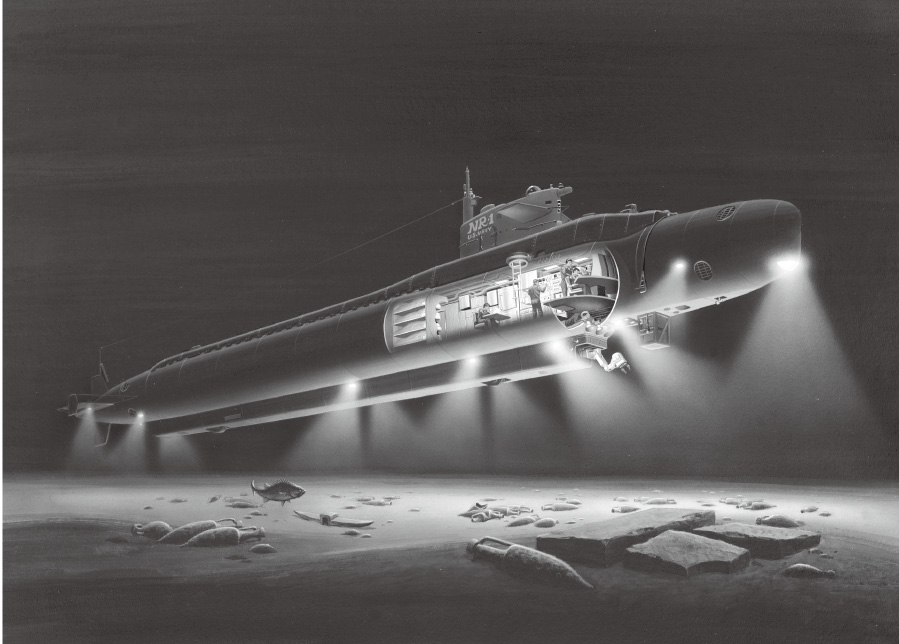
圖2–1 駐留在「謝爾克4號」上方的美國海軍「NR–1」號潛艇。「謝爾克4號」是公元前1世紀的失事船隻留在地中海900米(3 000英尺)深的海底的殘骸所在地
圖片來源:美國國家地理學會。
一天半的時間過去了,探險活動接近尾聲,我們準備回到海面上。通過水下電話尖銳的聲音,我們用非常正式的語氣提出了一個明確無誤的請求:「請告知海面天氣情況。」由於當時海面上狂風大作,浮出海面、回到「Carolyn Chouest」號可能有危險,於是我們再次來到「謝爾克4號」附近,又拍攝了一些照片。「NR–1」號潛艇配有底輪,我們把它開到離「謝爾克4號」幾百米的位置,停在海底。就這樣,在900米深的海底,我們一邊坐在狹小的船艙裡看戰爭片,一邊等待海邊的天氣轉好。這一等就是近兩天的時間。
一接到天氣轉好的消息,我們立刻開始上浮。這種迫切的心情與當初下潛時毫無區別。
回到「Carolyn Chouest」號時,除了因為這次搜索活動取得成功而感到高興以外,我的心情還是比較平靜的。但是,母船上的那些同事卻臉色發青。原來,這兩天的惡劣天氣讓他們筋疲力盡,多少還有點兒暈船。儘管我們的距離不足1.6千米,但是海面和海底卻是兩個截然不同的世界。我是一名機器人工程師,而不是潛艇上的固定工作人員。我親自去往海底的時間,遠少於我通過遙控機器人、光纖電纜等媒介遠程工作的時間,因此,接下來的事情自然能讓我體會到親身體驗的情感作用與遠程工作的認知作用到底有何不同。
我使用的主要設備是伍茲霍爾海洋研究所深潛實驗室製造的遙控機器人「傑森」,它的大小與一輛大眾汽車相仿。由於狂風肆虐,機器人「傑森」只能在「Carolyn Chouest」號的甲板上靜靜等待。天氣轉好後,「NR–1」號投入工作,我們也立刻行動起來。通過計算機控制系統,我們安排機器人「傑森」對事故現場展開了密集勘查。
我們坐在船上配有空調裝置的控制室裡,通過高帶寬光纖電纜與潛入深海「謝爾克4號」地點的機器人「傑森」建立了聯繫。在黑暗中,我們既要觀看機器人「傑森」傳回的視頻,監控傳感器,還要手忙腳亂地啟動各種計算機程序。7年來,我們準備的各種器材,包括各種傳感器、精確導航系統、計算機聯網控制等,都在這次下潛中得到了應用。在這些器材的協同作用下,機器人「傑森」在「謝爾克4號」上方僅一米的高度,以蝸牛爬行的速度精準地沿著預定航線,圍繞著事故現場行進。聲吶與數碼照相機通過反射回來的聲波與光線,收集了大量數據,然後傳輸到母船上的計算機硬盤。我建立的一個聲學導航系統負責監控機器人「傑森」的位置,以每秒若干次的頻率,將誤差不到一厘米的位置標籤添加到所有數據之中。
接著,船上的工程師和研究生們開始忙碌起來。他們要把大量圖片拼湊成還原現場的照片,還要利用聲吶數據製作高精度地形圖。這幅地形圖需要跟導航、計算機、傳感器和數據處理聯繫起來,構成一個統一的整體。我們之前做過類似工作,但是涉及的方面沒有這麼多,也從來沒有針對一個如此重要的地點完成這種工作。
機器人的探測範圍不僅遠遠超過「NR–1」號舷窗的視野範圍,而且能以定量的方式給出探測結果。潛艇讓我們親臨現場,而機器人則通過數字化處理將整片海底變成一個個字節。雖然我們坐在海面母船舒適的艙室裡,但是通過研究這些數據,通過對虛擬現場進行詳盡的探索,卻可以發現大量親臨「現場」無法看到的東西。
這時候,我們已經知道海難現場長約20米,寬5米,有兩堆古代的雙耳瓶。很多瓶子散落在一個個小坑裡,顯然,這些小坑是雙耳瓶下方微弱的水流沖刷形成的。大多數瓶子形狀各異,但有三隻同樣的瓶子藏身於同一個小坑裡,似乎是水流將它們聚攏在一起。僅憑雙眼透過舷窗觀察,海底似乎是平坦的,但實際上卻有一個幾厘米高的新月形隆起,勾勒出被泥土掩蓋的失事船隻的輪廓。
看到我們製作的數字地圖之後,船上的一名考古學家驚呼道:「你們在剛剛過去的4個小時裡,完成了我在發掘現場耗時7年才能完成的工作!」然而,攜帶水肺潛水裝備潛水的考古學家所製作的地圖,遠沒有我們繪製的「謝爾克4號」地形圖那樣詳細、精確。事實上,儘管它呈現的只是浩瀚海洋中微不足道的一小塊,卻是迄今為止最精準的海底地形圖。
這次「謝爾克4號」探測活動,為至少持續了8年的籌備工作畫上了一個句號。通過這次活動,我們掌握了製作超高精度數字海底地形圖的技術,這項技術必將引發一系列變化。首先,考古學的研究範圍以及通過深海勘查研究人類歷史的工作將隨之發生變化;其次,我們將掌握親臨現場遙控「發掘」遺址的技術;再次,在考古研究中,我們還將學會新的方法,把考察研究的重點集中在深海區域,以及穿梭於不同文明之間的古代貿易路線,並通過這些研究,提出一些新問題。但是,並不是所有人都對這些新方法持歡迎態度。
有人可能會認為利用機器人開展探險活動很麻煩,而有人則為之感到歡欣鼓舞。為了摸清有哪些阻力,我前後花了20年時間從事這方面的研究,並且有了一些發現。不過,在介紹這些情況之前,我們先看看在深海探險工作剛起步的時候,人們是如何來到海底深處的,再看看機器人「傑森」是如何登場的。
今天,利用機器人進行海洋探索活動已經是一件司空見慣的事了。遇到航班失蹤或者油井爆炸,機器人是我們勘查現場的第一個(通常也是唯一的)手段。但是,在機器人「傑森」漫長的研發過程中,人們各抒己見,展開了激烈的辯論。有的科研人員勸我們說:「那些機器人就是工程師的玩具,不可能派上用場。」有人則明確地說,作為一名真正的海洋學家,必須親自去到海底。一些名聲顯赫的考古學家認為,從本質上看,利用遙控機器人探索海洋深處的古代沉船現場,哪怕是拍攝照片,都是不道德的行為。
這些考古學家已經通過淺海勘查活動形成了自己的一套工作方法。戴著水肺潛水裝備,他們可以探索海面以下幾百米的水域,因此他們的活動範圍往往離海岸不遠。甚至大多數潛艇的探索範圍也僅限於海底水深幾千米的水域,根本無法進行深海勘查。(很多潛水器和機器人僅適用於近岸淺海環境,我們甚至可以用從五金店購買的零件自行拼裝。)
與之相比,深潛實驗室是深海研究專家,探索範圍常常可達水下數千米,觸及海中央、海溝或者潛沒帶。這些特殊極端的環境對人與機械提出了特別的要求。
工程技術上的全海深是6 000米(19 500英尺),整個海底90%以上的面積都處於這個深度。下潛到這樣的深度需要使用重型機械,因為想要讓電子元件保持乾燥,起保護作用的圓柱形金屬外罩在體積、重量與成本上都是電路本身遠不能及的。馬裡亞納海溝是已知最深的海溝,深度接近11 000米(超過35 000英尺),探索這裡需要更加專業的技術。環繞地球的洋中脊(看上去就像棒球上的接縫)向上隆起,其頂部與海面之間的距離為2 000~4 000米。
機器人「傑森」的主要競爭對手不是「NR–1」號潛艇,而是伍茲霍爾海洋研究所在20世紀60年代研發而成,可以將科研人員的眼睛、身體和大腦直接送到深海的現代化深海潛水器——「阿爾文」號。在20多年的時間裡,人們一直在利用這台白色的潛水器收集科研數據,因此它經常佔據媒體的顯要位置,讓公眾讚歎不已。在「阿爾文」號的發展歷程中,機器人系統與載人系統攜手發展,共同進步。它們之間的連接紐帶就是羅勃·巴拉德。
羅勃·D·巴拉德並沒有發明任何相關技術,他本人也不會以發明家自居。巴拉德是一名科研人員,沒有接受過工程技術方面的訓練,但他與工程技術人員的合作十分愉快。他在從事科研時也不局限於現有的工具設備,而是不斷地思考科研工具可能的發展前景,這個特點在科研人員當中並不多見。在他使用的那些機器人系統中,有很多零部件都曾用作他途。但是,巴拉德在深海研究方面經驗豐富,提出了利用遙控機器人探索深海環境的設想,並且組建了一個實驗室和一個團隊,來實現這個設想。他率領團隊完成的幾個重點項目,證明了這種技術的可行性。現在,回想起他對我的教導,我才意識到他的遠程探索深海的設想對我的思想產生了多麼深遠的影響。
在越南戰爭期間,巴拉德是一名海軍軍官,他於1966年從加利福尼亞來到伍茲霍爾海洋研究所。巴拉德的父親是一名工程師,從事過慣性制導系統方面的工作。巴拉德早年在美國北美人航空公司工作,從事早期潛水器研究,儘管他更感興趣的是科學研究,而不是技術細節。在開始攻讀海洋學碩士學位後不久,他就應徵入伍,成了一名海軍,並被任命為伍茲霍爾海洋研究所與美國海軍研究辦公室(ONR)的聯絡員。伍茲霍爾海洋研究所像一所大學,是私人資助的研究機構,但在當時,它的大多數資金都來自海軍。
美國海軍認為,深海研究與「冷戰」時期的軍力建設關係不大(戰鬥潛艇下潛的深度不足600米),因此對這方面的研究興味索然。但是,1963年,一艘載有129名官兵的核潛艇在水下2 600米(8 400英尺)的位置失事,使得情況發生了徹底的改變。美國海軍意識到,在這些造價昂貴、攜帶秘密並且具有危險性的裝備隕落深海之後,美國海軍根本沒有辦法搜救。因此,海軍研究辦公室開始資助伍茲霍爾海洋研究所研發潛水器(與潛艇的不同點在於,潛水器不能依靠自身動力在水下行進。潛水器通常由母船運送至目的地,潛水方案也以垂直下潛為主)。這是一個形狀標準的球體,安裝有各種各樣的系統和電池,直徑約為2.1米,由HY–100型特種鋼(後期改用鈦)製成。他們把這台潛水器命名為「阿爾文」號。
1966年,美國空軍的一架B–52轟炸機墜毀,導致一枚氫彈遺失在西班牙附近海域。之後,「阿爾文」號成功地定位並從近900米深的海水中撈出了這枚氫彈,證明了它不凡的能力。不過,在「阿爾文」號浮出水面之前,氫彈再次掉入海中,而且落至更深的未知海域。美國海軍動用了仍處於實驗階段的遙控水下機器人(CURV),完成搜索工作。這次搜索並不順利,但它進一步說明我們的確需要深潛技術。同謝爾克暗礁的探索工作一樣,載人系統與遙控系統再一次並肩作戰。
在阿波羅登月時代,美國人希望把人送到太空。現在,他們希望將人類送到海底世界。在諸多海洋項目中,有一部分與「阿爾文」號有關。將人類送上月球的阿波羅計劃得到了無數的資金支持,而同樣是將人類送到從未涉足的領域,「阿爾文」號團隊好不容易才籌集了幾百萬美元的資金。
作為美國海軍研究辦公室與伍茲霍爾海洋研究所之間的協調人,巴拉德殫精竭慮、努力工作。在越南戰爭之後的裁軍行動中,巴拉德離開了美國海軍,加入了伍茲霍爾「阿爾文」號研發團隊,任務是為「阿爾文」號尋找新客戶。用巴拉德自己的話說,他就是「科研成果推銷員」。巴拉德還選擇到羅德島大學繼續深造,攻讀海洋地質學博士學位。完成學位論文之後,他成為伍茲霍爾海洋研究所的科學研究員。
在20世紀60年代後期和整個20世紀70年代,「阿爾文」號在完成各種科學考察任務的同時,探索範圍逐漸向外延伸,安全可靠性、機動性以及攜帶科研設備、採樣器與操控工具的能力不斷增強,下潛深度也不斷增加,達到4 000米(13 124英尺)。
「阿爾文」號的工程技術歷史的起始時間與「板塊構造學說」的提出時間大致相仿。整個20世紀,「大陸漂移學說」不斷發展。在20世紀60年代,有人據此提出了「板塊構造學說」。海洋地質學這門年輕的科學站到了最前沿的位置,通過一些有說服力的深海測量與地震勘查數據,為地殼形成於海底的觀點提供了證據。人們認為,在各大板塊沿海溝分離時,老地殼掉落進地球內部,新地殼則沿著洋中脊形成。
但是,科學家幾乎沒有辦法從自然環境中找到任何直接證據,來證明「海洋擴張學說」是正確的。傳統的做法是利用船隻懸掛或拖拽勘查設備,但是在研究洋中脊特點以及取樣時無法滿足精確性要求。
1973~1974年,美國與法國合作實施了「法摩斯」計劃(Project FAMOUS),即法美聯合大洋中部海下研究計劃,由兩台法國潛水器與「阿爾文」號一起完成一系列下潛任務,繪製洋中脊地形圖和採集樣品。這個項目為板塊構造說提供了重要證據,從此深海探索的時代拉開了帷幕。
不僅如此,「法摩斯」計劃第一次將「阿爾文」號帶到遠離海岸的深水區,證明了「阿爾文」號的確在科學研究活動中可堪大用。巴拉德回憶說:「在板塊構造學說被人們真正接受的過程中,『阿爾文』號發揮了不可或缺的作用。這的確是一件幸事!」不過,巴拉德認為,儘管「阿爾文」號經受住了「法摩斯」計劃的檢驗,但是科學界仍然視其為毫無價值的「噱頭」。
後來,「阿爾文」號與水聲應答器的結合使用,為證明「阿爾文」號在科研上的可靠性提供了關鍵證據。水聲應答器是伍茲霍爾海洋研究所根據與美國國防部高級研究計劃署(ARPA)簽訂的合同開發的技術,由電池供電。在開始一系列的下潛活動之前,科研人員利用母船在研究區域搭建了一個水聲應答器網絡,為潛水器提供精確的直角坐標。在監聽到脈衝信號之後,各個應答器都會回應一個不同頻率的脈衝信號,但在回應之前有一個固定時長的時滯。通過「詢問」這些應答器,「阿爾文」號或母船(或者其他任何設備)就可以根據收到的回應,確定自己在研究地點的位置。這些導航數據為「阿爾文」號給出量化探測結果奠定了基礎,也有助於科研人員確定科研樣品或觀察結果在洋中脊體系中的精確位置。
巴拉德想出了很多辦法,讓「阿爾文」號的探測數據可用於科學假說的驗證。他認為,在「阿爾文」號的幫助之下,科研人員可以在深海中借用野外地質考察的手段。巴拉德說:「地質考察的關鍵因素是科研人員訓練有素的頭腦、雙眼以及手中的地質錘。這台小巧靈敏的白色潛水器的重要作用則是,幫助伍茲霍爾海洋研究所深潛實驗室的海洋地質學家抵達海底,並完成實地觀察。」
從「法摩斯」計劃的補充數據看,洋中脊系統的海底熱液並非一直在增加,因此,科研人員猜想可能有大量的海底熱液從地球的某個位置排放到了海床上。海水有可能在覆蓋壓力的作用下進入地殼,受熱後又從地殼下噴發出來。1977年,巴拉德和一組科研人員在加拉帕戈斯群島完成的一個項目表明,群島附近就存在這種熱液噴口。
他們不僅發現了這些熱液噴口,在其周圍還發現了異乎尋常的生態系統。在這片一度被人們認為沒有任何生物的區域,竟然存在著大量常見於深海環境的生命。但問題是,這次考察的目的是勘測海底的地質結構,隨行人員中沒有生物學者,因此,他們沒有辦法繼續跟進這個驚人的發現。
於是,巴拉德快速安排了遠程單邊帶無線電會議,與在伍茲霍爾海洋研究所總部的生物學者霍爾格·若納什及弗雷德·格拉斯進行討論。巴拉德回憶說:「我們問霍爾格與弗雷德如何處理這種情況。這相當於把生物學研究生的4年野外作業壓縮成一次臨時安排的無線電會議。」儘管通信方式非常簡陋,但其傳遞的新的專業知識卻對海底研究產生了不可忽視的影響。
除了「阿爾文」號之外,「法摩斯」計劃與加拉帕戈斯群島探測活動還動用了另外一種裝置——一台名叫「安格斯」(ANGUS)的橇狀照相裝置。儘管人們對這種裝置的關注度並不高,但是它為未來的機器人技術播下了種子。在「阿爾文」號下潛之前,人們將「安格斯」放到水中,並以長長的電纜固定在船的後面。
「安格斯」的大小與一輛小汽車差不多,內部裝有一台膠卷高度為35毫米的彩色照相機。照相機安有閃光燈,每10秒左右閃爍一次。在行進時,水面上的人只能(利用聲學測高計)接收到回饋的基礎數據,瞭解該照相裝置相對於海底的高度。然後,他們通過收放電纜,讓「安格斯」保持在拍照的理想高度,即距海底約4米(13英尺)的位置。
洋中脊的地形可能崎嶇不平,經常會出現讓人猝不及防的陡坡。「安格斯」的金屬框架非常結實,即使發生碰撞,其內部照相機受損的可能性也非常小。在幾個小時之後,人們就會把「安格斯」收回來,處理照相機裡的彩色膠卷。「安格斯」團隊借用當時非常流行的天美時手錶廣告語「風吹浪打,永不停歇」作為座右銘,把「安格斯」比作自動計時的鐘錶。由於操控簡單方便,因此他們把「安格斯」戲稱為「拴在繩子上的小玩具」。
不過,用2.4千米長的電纜拖拽一個笨重的機器,其實是一項非常需要技巧的工作。電纜與人的拇指差不多粗,在浩瀚的海洋中看起來尤其纖細,但是幾千米長的電纜放到一起,規模就非常大,相當於在水中拖拽一間房屋。如果拖拽的速度過快,牽引力有可能導致機器上浮,使它與海底的距離過大,無法獲取有價值的數據。只在拖拽速度非常慢的情況下,機器的重量才能抵消漂浮力。而且,由於牽引力極難控制,船與機器實現同步運動需要不短的時間,有時甚至需要好幾個小時。
團隊試圖拖拽機器,沿著一系列筆直的等距航跡線,在洋中脊上方來回運動(被稱作「修剪草坪」。幾年後,我們常用「NR–1」號潛艇來完成這類工作)。但是,一旦出現偏差,修正就需要兩個小時,因此沿筆直的航跡線運動並不是一件容易的事。在航跡線的盡頭,機器完成船與機器的掉頭有可能需要一整天的時間。
大多數大型船隻沒辦法以足夠慢的速度航行,即使直行也無法使速度放得很慢。但是,伍茲霍爾海洋研究所的科學考察船「克諾爾」號有一對獨特的擺線推進器,可以在海洋裡圍繞一個點巡察,或者沿任何方向以極低的速度航行(後來,在安裝了石油工業中常見的動力定位系統之後,「克諾爾」號同樣可以實現這些功能)。
起初,電纜絞車與船體的控制(這些都是艦船的傳統職能)都是通過「克諾爾」號的艦橋來完成的。「安格斯」團隊在位於後甲板的控制室裡,通過發出「升一級」或者「降一級」的指令來控制絞車。最終,這些微指令讓他們非常厭煩,因此他們在控制室裡加裝了一個絞車遙控箱,後來又把遙控箱接入考察船的計算機控制系統。即使在機器人技術興起之前,這些技術也要求對人類控制的性質與介入時間進行某些調整。
安格斯團隊成員約翰·玻蒂爾斯回憶說:「我們發現,就控制水下照相機而言,一個小時大概就是一個人的極限了,否則就會出錯。」操作人員必須全神貫注地盯著航線記錄紙,瞭解機器相對於海底的高度,並通過絞車將機器保持在合適的高度上。在記錄紙上,這個高度僅為0.75厘米。操作人員還要與艦橋配合,給考察船下指令,讓它緩慢前進。
這些早期項目為後期的技術發展奠定了基礎,也為後來重大分歧的出現埋下了伏筆。遙控系統「安格斯」與載人系統「阿爾文」號進行了合作,在夜間「阿爾文」號充電時,由「安格斯」完成下潛任務。船上的聲學導航系統與精確定位系統構成了一個統一協調的整體,既可以從海底發回定性數據,還可以提供定量數據。
與伍茲霍爾海洋研究所之間的無線電呼叫,突出說明了探險活動的不可預測性。如果這是一次真正的探險活動,而且事先不知道會有什麼發現,那麼出發前你所選擇的人員有可能並不是最佳人選。而一次簡單的無線電呼叫就可以幫助你與更多的專業人員建立聯繫。
最後要說明的是,非智能的「安格斯」也有局限性。直到下潛活動接近尾聲,操作人員才能處理相機裡的膠卷,才能知道膠卷是否記錄下任何數據,以及那些數據是否有用。有時候,由於照相機在探測活動的前5分鐘就已經損壞,或者曝光設置有問題,導致一整天的下潛活動都在做無用功。
在後期接受採訪時,「安格斯」團隊的所有成員都不認為他們曾經「親臨」海底。在加拉帕戈斯群島完成第二次探測活動之後,令「安格斯」團隊激動不已的並不是他們自己拍攝的照片,而是「阿爾文」號完成下潛任務之後帶回來的視頻。團隊成員史蒂夫·蓋格說:
「我們激動得說不出話!雖然我們看過它們(深海生物)的照片。……但是,通過乘坐在『阿爾文』號裡面的人的雙眼去觀看……海底世界活生生地展現在我們的眼前。這太神奇了!在水波蕩漾中,你能看到龍介蟲,還能看到一隻螃蟹在爬行……真的,在親眼看到這段視頻之後,你就能理解大家矢志不渝追求的到底是什麼了。在那一刻,我明白了很多事情。」
25年過去了,仍然清楚地留在蓋格記憶中的不是「阿爾文」號團隊成員的各種描述,也不是海底探索留給他們的個人體驗,而是那段視頻,那段海底的影像。
「安格斯」的局限性與體驗無關,而與時間有關,因為沖洗彩色膠卷、獲取反饋信息需要耗費很長的時間。如果能夠快速顯示那些圖片,從而及時調整下一步的行動方案,情況肯定會大不相同。
巴拉德注意到,「阿爾文」號上有一個與之類似的現象。在前兩次下潛時,生物學者們與「阿爾文」號的操控人員都無法確定熱液噴口的位置。儘管在這次探測活動中,巴拉德是安格斯團隊的負責人,而不是「阿爾文」號的正式工作人員,但科研小組還是請他來到母船上,並請他乘坐「阿爾文」號下潛到海底,幫助尋找這些熱液噴口。到達海底之後,巴拉德看到一條裂縫,接著又看到許多螃蟹。他們「跟隨著越來越龐大的螃蟹群」,終於找到了熱液噴口。
巴拉德異常激動,他轉過身看著霍爾格·若納什。霍爾格是伍茲霍爾海洋研究所的高級科研人員,也是最早看到這個驚人發現的生物學者。巴拉德在回憶當時的「阿爾文」號的內部情景時說:「就這樣,我們到達了那裡。我永遠不會忘記當時的情景。霍爾格背對著舷窗,眼睛盯著監視器。我問他,『霍爾格,你在幹什麼?』」
「我在看電視圖像啊。」
「你為什麼不看窗外呢?」
「電視(圖像)更清晰啊。我能看得更清楚。」
雖然這位科研人員已經親臨海底,但是從照相機傳輸過來的彩色電視圖像非常清晰,因此他寧願觀看電視圖像。巴拉德回憶說:「我不由得眼前一黑。我們辛辛苦苦來到海底,到底是為了什麼?」
1980年,巴拉德向斯坦福大學申請了公休假,準備把這次探索活動的結果出版成書,同時為申請伍茲霍爾海洋研究所的職位做準備。身處硅谷這所世界級的工程技術學校,又恰逢個人電腦革命剛剛興起,他把自己的目光轉向用新方法進行深海探索的研究上。
巴拉德這樣寫道:「在利用『安格斯』輔助繪製洋中脊關鍵部分的地形圖之後,我意識到人們終有可能開發出更複雜、更先進的遙控無人水下機器人,而且它在科研與探測領域發揮的作用將遠遠大於『阿爾文』號。」在巴拉德的設想中,載人潛水器的「前景堪憂」,將面臨遙控水下機器人的挑戰並被後者取代,而且後者的重要性將遠超前者。
1981年,巴拉德的朋友塞繆爾·馬修斯在《國家地理》雜誌上發表了一篇題為「新海洋世界」的文章,對海洋探測活動中使用的各種工具進行了調查。文章用一個整版的圖片展示了人類親臨深海所使用的各種工具,主要是潛艇和潛水器,包括「NR–1」號,深海潛水器的「裡雅斯特」號,還包括威廉·畢比獨創的深海球形潛水器和「阿爾文」號。此外,文章也談及一些遙控系統,包括美國斯克裡普斯海洋研究所的「深拖」系統(Deep Tow,參加過加拉帕戈斯群島的科考活動)和法國的新型無纜水下機器人「埃波拉爾」。
巴拉德的一個新創意也出現在圖片之中。這是一個「雙體」系統,包括一個與「安格斯」相仿的橇狀裝置和一個可移動的水下機器人。巴拉德根據虛構小說中的科考人員及其船隻的名稱,把這個系統命名為「阿爾格–傑森」。文章用一張圖片專門展示了他的這個構想,並將「阿爾格–傑森」描述成:「不會載人,但在攜帶其他傳感器的同時可以將人類的眼睛、耳朵送至深海的機器人」。文章還引用了一段沒有標明出處的引言(可能引自巴拉德),稱「它們比『阿爾文』號等T型船隻更加高效……(可以幫助)科研人員把目光(以及思想)投向海洋深處,不僅沒有任何危險,而且『下潛』時幾乎不受時間的限制」。
馬修斯利用一張精美的圖片向讀者展示了這套系統:一艘正在利用測深聲吶掃瞄橇狀裝置「阿爾格」前方水域的船隻,與岸上的衛星鏈路(取代了有雜聲的單邊帶鏈路),利用聲吶和攝像機掃瞄勘查區域的「阿爾格」,以及從「阿爾格」的「車庫」中駛出的、利用兩隻仿生機械臂從洋中脊採集生物學樣品的球形機器人「傑森」。
回到伍茲霍爾海洋研究所(並獲得了所申請的職位)之後,巴拉德就開始利用自己推銷科研成果的特長,去說服海軍研究辦公室接受他的設想。長期以來,海軍研究辦公室一直支持基礎性海洋科學研究(這也是巴拉德當初在伍茲霍爾海洋研究所就職的原因),但該所還希望擁有探測(或者移走)失事船隻內部物品的能力。核潛艇「長尾鯊」號與「天蠍」號分別於1963年和1968年沉沒之後,海軍希望瞭解是否有核洩漏的風險,還希望繪製失事地點的完整地圖。然而,利用「阿爾文」號這樣的潛水器是很難完成這個任務的。此外,儘管沒有點明,但很顯然,美國海軍還希望探測其他國家的海軍失事船隻。
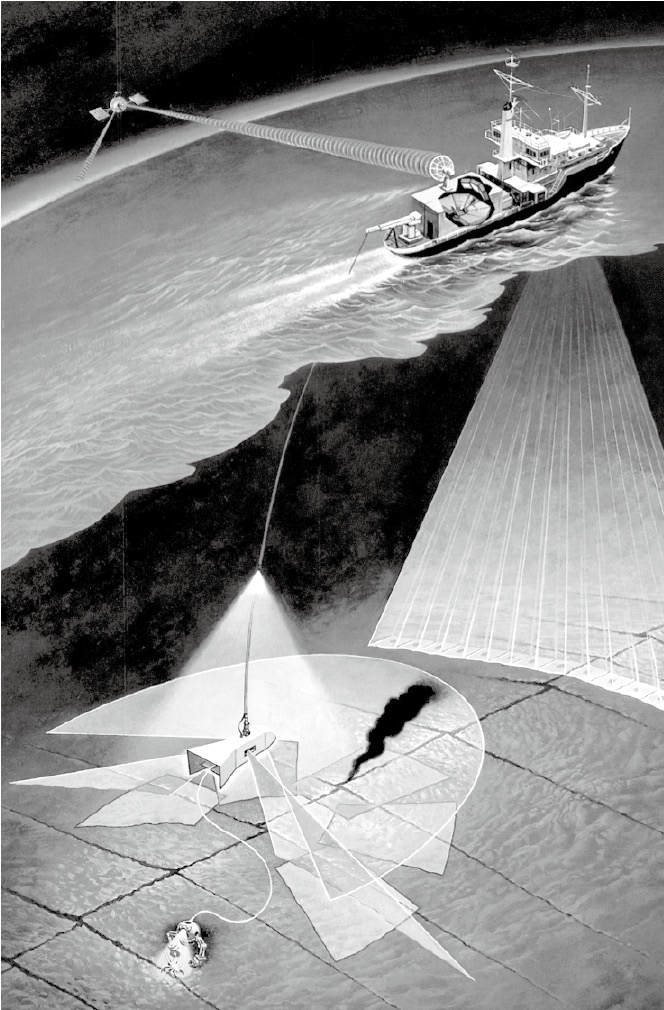
圖2–2 羅勃·巴拉德利用遙控水下機器人「親臨」深海的早期設想(1981年)。連接在海洋考察船下方的橇狀裝置「阿爾格」負責掃瞄洋中脊,遙控水下機器人「傑森」則負責完成近距離探測工作。巴拉德希望利用這張圖片贏得人們對他的「遠程臨場」設想的支持,完成工程技術人員的招募工作
圖片來源:美國國家地理學會。
巴拉德很快就獲得了成功,他承諾每年都會騰出一個月時間建造他的那套系統,並允許美國海軍使用該系統;作為回報,海軍研究辦公室每年為他撥付60萬美元的資金(這筆錢有很大一部分實際上是海軍情報部門秘密支付的。之所以用海軍研究辦公室的名義支付,是因為美國海軍研究辦公室是科學研究領域裡的一個知名機構)。1982年,巴拉德離開「阿爾文」號團隊,並組建了自己的團隊——深潛實驗室。人類親臨海底世界與遠程臨場之間的不同,不僅表現在彼此獨立的技術系統方面,還表現在彼此獨立的人員團隊方面。而且,這兩個團隊之間難免出現不和諧的情況。
建造好寬敞的新實驗室之後,巴拉德開始採買設備,招募人手。他的實驗室搭檔斯基普·馬爾凱是伍茲霍爾海洋研究所的工程師,在「阿爾文」號團隊裡工作過很長時間,研發了關鍵的聲學導航系統。馬爾凱認為,「阿爾文」號已經發展成熟,因此他正在尋找新工作。巴拉德與馬爾凱一起說服了安格斯團隊裡的一些資深研究人員加入他們的新團隊,包括湯姆·克魯克、厄爾·楊、史蒂夫·蓋格,以及凱西·奧芬格爾(此後多年,奧芬格爾一直是巴拉德的得力助手)。此外,他們還從美國洛克希德公司找來了電氣工程師斯圖·哈里斯。哈里斯參加過衛星數字成像的大型項目,有這方面的管理經驗。
團隊準備採取分步進行的策略:先研發連接同軸電纜的「阿爾格」,然後將同軸電纜升級為光纖;至於水下機器人「傑森」,他們準備先開發可以深入失事船隻內部進行探測工作、尺寸較小的版本,再開發與「阿爾格」配套的全尺寸版本。
巴拉德期待海軍研究辦公室為自己的實驗室提供支持,但是美國海軍研究辦公室建議他與麻省理工學院合作,因為他們已經支持了麻省理工學院的一位研究人員從事遙控機器人技術的研究。這個人就是麻省理工學院的教授湯姆·謝裡丹。謝裡丹的求學歷程非常特別,曾先後師從行為心理學家伯爾赫斯·弗雷德裡克·斯金納和一位機械工程師,而且一直對人機交互很感興趣(斯金納的「黑箱」行為理論對工程技術人員來說,具有經久不衰的吸引力)。1979年,三里島發生核事故之後,謝裡丹參與了相關調查活動,這次調查對早期的人因工程學領域產生了深遠的影響。
謝裡丹(後來成為我在麻省理工學院的論文指導老師之一)研究過真實系統中的人機交互,他發現完全由人類控制的全手動系統與由計算機全權處理所有事務的全自動化系統幾乎不存在。事實上,大多數系統在「自動化譜系」(spectrum of automation)上的位置都介於這兩者之間,並且在實時條件下會變換位置。謝裡丹把這種變化叫作「監督控制」。在這個過程中,人與機器一起工作,通過交換控制權調整「自動化程度」,以適應當時的情況。此外,謝裡丹還發現,監督控制系統的效果對該系統所在的社會環境有較強的依賴性。
巴拉德去麻省理工學院拜訪謝裡丹時,遇到了一位名叫戴納·約傑的年輕工程師。約傑出生於一個造船工人家庭,在麻省理工學院學習機械工程的同時,還對海洋充滿了興趣。謝裡丹開闊的眼界讓他心折不已:「在工作之餘,他還對社會事務……對技術的社會效用產生了濃厚的興趣。事實上,他認為要學好技術,這方面的知識必不可少。」當時,約傑已經獲得了博士學位,正在一邊找工作,一邊在謝裡丹的實驗室裡從事博士後研究工作。
這時候,羅勃·巴拉德來了。約傑回憶說,巴拉德「竭力兜售」他的「阿爾格–傑森」系統,還讓他和謝裡丹看《國家地理》雜誌上的那張圖片。約傑仍然清楚地記得當時的情景,他一邊抬起頭看著牆上的鐘,一邊回憶說:「我們是上午10點鐘見面的。上午10點20分的時候,我就對自己說:這正是我希望從事的工作。」
於是,約傑加入了這個新實驗室。當時,巴拉德給實驗室起的名字是DSEL,意指「深潛工程實驗室」,後來技術人員厄爾·楊把實驗室叫作「diesel」,於是,巴拉德把實驗室的名字改為「DSL」。這是因為在海軍內部,「diesel」代表過去的那個非核潛艇的鼎盛時代。
為了給新實驗室配置人手,巴拉德不僅需要聘請更多的擁有博士學位的研究人員,還需要招募其他人才。在伍茲霍爾海洋研究所北面的不遠處,有一家名叫「海底生物」的小公司。這家公司的創始人薩姆·雷蒙德是麻省理工學院教授哈羅德·「博士」·艾格頓的學生。艾格頓借助自己發明的電子閃光燈拍攝下子彈穿過蘋果的照片,並因此名聲大振。他還研發出可以用於海洋研究的照相機和閃光燈,由海底生物公司推向市場。
海底生物公司也曾嘗試研發簡單的帶纜淺潛機器人,但沒有商業價值。他們還把一台叫作「RPV」(遙控飛行器)的樣機贈送給伍茲霍爾海洋研究所。
之後不久,馬薩諸塞州昆西市發生了一起青少年失蹤案。消防部門擔心這個孩子可能掉進了一個蓄滿水的廢棄採石坑中,於是消防部門找到伍茲霍爾海洋研究所,請他們幫助尋找這名青少年。巴拉德認為,這是新機器人一展身手的良機,便安排湯姆·克魯克與厄爾·楊前往昆西。這兩名技術人員有多年的海上以及在深海等險惡環境工作的經驗,但對於機器人技術卻不太瞭解,因此他們從海底生物公司請來了年輕的機器人操控專家馬丁·鮑恩。
馬丁·鮑恩這個人可不簡單,正是他提出並率先操控遙控機器人進行深海探測活動。5年前,他多次操控遙控機器人沿著「泰坦尼克」號的大樓梯往下走。鮑恩是一名技術人員,也懂得潛水、生物與攝影技術。他在海底生物公司的工作是組裝生產工具,他對新型機器人有著濃厚的興趣。
海底生物公司有一個室內游泳池大小的耐壓試驗筒。鮑恩用了好幾個晚上的時間,待在試驗筒裡鑽研精確操控機器人的技術。他將試驗筒的窗戶蓋住,利用鋁管臨時搭建了一些腳手架,來模擬水下建築。然後,鮑恩僅依靠機器人前視攝像機捕捉的圖像,操控機器人完成進出水下建築的操作。由於攝像機的視野十分狹窄,因此這是一種非常新奇的體驗。
鮑恩認為,這種心理狀態與他從事商業潛水活動的體驗非常相似。他說:「(在商業潛水時)如果感覺身後一直有動靜,我就必須意識到有什麼東西想咬我的腳蹼。這種經驗可以輕鬆地應用於水下機器人發回的3D(三維)圖像,比如我意識到:哦,有東西正在咬我的電纜。」這種帶有電纜的水下行動平時並不多見,但是鮑恩還是培養出了「如何冒險前進以及觀察、記錄、撤回的意識」。在公司試驗筒裡度過的那些孤寂的夜晚,鮑恩「不停地玩著這種『糖果屋遊戲』,操控機器人從這些『腳手架』裡反覆進出,然後安然返回。整個過程必須小心翼翼,以免被電纜纏繞住」。此外,作為一名攝影師,鮑恩對於如何表現水下世界的3D動態效果有一定的心得體會。
鮑恩、克魯克和楊來到採石場,準備開始搜救工作。他們接手的是一項奇怪的任務。在這個120米深的採石坑底部,舊汽車與購物車佔據了大部分面積。但是,令人不舒服的目標似乎隨時會出現。鮑恩回憶說:「每次轉動機器人攜帶的攝像機,我都在想我有可能看到一雙球鞋、一條短褲和一張年輕的臉。」最終,他們並沒有找到目標。幾年之後,這名青少年被找到了,他仍然健健康康地生活在得克薩斯。失蹤案原來只是一出惡作劇。
但是,伍茲霍爾團隊卻從中收穫了寶貴的經驗。他們不僅完成了搜救工作,還繪製了採石場的地形圖。他們利用電纜控制機器人向前運動,估算機器人所在的位置,確保不留任何死角。這件事給巴拉德留下了深刻印象,他邀請鮑恩加入他的實驗室。鮑恩本人也因為這項工作的前景而感到無比興奮。在提到克魯克和楊時,鮑恩說:「這兩個人都是實幹派,他們不會只坐在電腦屏幕前,而是親自前往海洋深處。他們是項目取得進展的有力保證。」令人意想不到的是,後來他們確實親臨海洋深處了,但在出海的過程中卻一直坐在電腦屏幕前。
鮑恩加入的時候,巴拉德的新實驗室一派紅火,「阿爾格」的研發工作已經開展了一段時間。同「安格斯」一樣,「阿爾格」也是一個用電纜拖拽的橇狀裝置,巴拉德把它形容為「一輛客貨兩用車大小、裝有一個輕快的尾鰭、用白色鋼管製成的不可思議的拖拽裝置」。與之前的類似裝備不同的是,「阿爾格」直接通過線纜傳輸遙測數據和實時視頻,與此同時,它也可以利用膠片攝像機拍攝靜止圖像。由於強度適合海洋學研究的光纖電纜還需要幾年的時間才能研製出來,因此「阿爾格」使用的是傳統的同軸電纜,與我們插到有線電視機頂盒後面的電纜非常相似。用一根導線完成多路傳輸,傳送電力、數據和視頻等,這是一件非常複雜的工作。如果在調諧或者屏蔽方面出現問題,信號就會彼此干擾,導致數據出現噪聲、視頻出現雪花點。
戴納·約傑是團隊中唯一擁有博士學位的工程師,他的任務是根據長電纜的力度變化,改善海面船隻自動「動態定位」的效果。他還啟動了一個計劃,研究如何利用自動化技術改進機器人下潛到海底的能力。如果海面船隻可以利用位置反饋數據保持靜止,那麼它為什麼不能確定機器人的動態位置呢?需要什麼新技術才能實現這個目的呢?這樣的監督控制系統如何為水下機器人操控者和科研人員提供幫助呢?
1984年夏天,「阿爾格」準備就緒,並且已經在1 740米深的「長尾鯊」號潛艇失事水域進行了一次徹底的實地勘查。從橇狀裝置傳回的實時視頻非常珍貴,幫助研究人員確定了失事潛艇的位置,還起到了導航作用。
但是,視頻所發揮的最重要作用還是為團隊帶來了巴拉德所期盼的存在感。巴拉德在回憶錄中寫道:「毫無疑問,控制室裡的所有人都覺得自己與『阿爾格』一起潛入了大海。我們待在安全的海面上,置身空調的舒適觀察室裡,同時讓『阿爾格』把我們勤於觀察的雙眼、善於思考的大腦帶入海底……那些電腦顯示屏看上去並不像監視器,而更像一個個舷窗。」與之相比,聲吶圖像與其他傳感器數據只不過讓船員的體驗更加逼真。
「長尾鯊」號潛艇搜救工作讓巴拉德與DSL實驗室贏得了美國海軍研究辦公室的信任。第二年夏天,美國海軍研究辦公室為「阿爾格」勘測「天蠍」號潛艇失事地點留出了三周時間。同時,雙方還達成了一項協議:如果這次任務提前完成,該團隊可以利用剩餘時間完成其他海洋探測項目。最終,「天蠍」號勘查工作同樣取得了成功。
因此,「克諾爾」號與「阿爾格」一起,再次與一支法國科考隊進行合作,啟動了協議裡規定的「其他海洋探測項目」。對於巴拉德而言,這意味著他可以重拾尋找「泰坦尼克」號的夢想。
1985年8月31日,「阿爾格」在北大西洋海底上方9米處的艱難搜索工作已經持續了一周時間。一天,控制室裡的人終於在模糊的黑白視頻影像裡看到了失事船隻的金屬殘骸,接著他們又看到了一個清晰可辨的鍋爐。就這樣,沉沒在海底的「泰坦尼克」號終於被找到了。
在隨後的幾天裡,興奮不已的「阿爾格」團隊用照片、視頻和測量數據對「泰坦尼克」號的失事地點進行了詳盡的記錄。「安格斯」也參加了行動,一共拍攝了數以千計的膠卷高度為35毫米的彩色靜止照片。最終發表在《國家地理》雜誌上的那幅拼接圖片,是巴拉德的老師、地質學者艾爾·尤察匹利用剪刀和膠水,一張一張親手拼湊起來的。
「泰坦尼克」號失事地點的發現,後來被視為20世紀最偉大的海底發現,這讓巴拉德、水下機器人以及伍茲霍爾海洋研究所再一次名聲大噪。此外,它還引發了公眾對深海的想像。自古以來,深海就是人類不可企及的神秘世界,而現在,遙控水下機器人幫助人們揭開了它的神秘面紗。
在「克諾爾」號返航後,數以千計的家庭和祝福者趕到伍茲霍爾小鎮,他們湧上碼頭,歡迎這些發現「泰坦尼克」號的英雄凱旋。巴拉德等人下船後,伍茲霍爾海洋研究所在碼頭附近的禮堂召開了新聞發佈會,來自世界各地的記者擠滿了整個禮堂。
這是一個偉大的成就,足以改變巴拉德今後的人生道路和職業生涯。巴拉德利用召開新聞發佈會的契機,向世人介紹了他的「遠程臨場」設想。他指出,「阿爾格」以及伍茲霍爾正在研發的類似設備,標誌著水下探測領域正在發生一場「顛覆性的革命」。他說:「這是遠程臨場時代的開始。從此以後,我們的精神、眼睛和思想可以離開我們的身體,前往海洋深處,到達海底……我們已經進入了一個水下探測的全新階段。」
「泰坦尼克」號的發現是通過遠程臨場的方式完成的,在這個過程中,人們並沒有親臨海底。出於這個原因,伍茲霍爾海洋研究所的內部關係在很長一段時間裡都有點兒緊張。
第二年,伍茲霍爾海洋研究所再次對「泰坦尼克」號失事地點進行船體內部勘查時,這種緊張關係達到了極致。美國海軍給DSL實驗室送來了一個名叫「AMUVS」的小型水下機器人。它是一個圓形機器人,可以由潛艇的魚雷發射管發射出去,用來執行一些細碎任務。
人們把AMUVS比喻成「水面下左顧右盼的眼睛」。的確,這個說法表現的正是遙控水下機器人最基本的功用——按照遠程遙控指揮的人類的意願轉動水下攝像機進行拍攝。AMUVS安裝在深海潛水器「的裡亞斯特」號的外殼上,但由於安裝的問題,它的效果並不十分理想。不過,AMUVS催生了大量商業產品,比如RCV–225,後者是一種早期的遙控水下機器人。
AMUVS的設計中規中矩,除了有一個突出的亮點——它的耐壓外殼以鈦為材料,由機器整體加工而成,造型奇特,外觀非常漂亮。它的大小與台式電腦差不多,裡面有各種電子元器件,上面還有一個石英材質的半球狀物體,裡面裝有攝像頭。後來,人們以這個耐壓外殼為核心部件,研發出一種新型的水下機器人。
DSL實驗室的工程師們把AMUVS的內部元件取出,代之以一台在模型飛機伺服系統控制下可以上下左右調整拍攝角度的攝像機,再在外殼外面包裹一層新型水下發泡材料,還安裝了新型電動推進器。他們把改造後的機器人稱作「小傑森」(巴拉德已經制訂了研發全尺寸「傑森」的計劃)。他們希望「小傑森」可以證明,水下機器人能夠進入失事船隻內部並獲得一些有價值的發現。
巴拉德的「遙控水下機器人將取代載人潛水器」的觀點在「阿爾文」號團隊內部也引起了關注。一方面,巴拉德直接採用推銷員的做法,抓住一切機會宣揚發展進步觀,介紹海軍贊助商與公眾都深信不疑的發展情況。另一方面,巴拉德玩起了官僚政治的那一套,讓實驗室內部的研究人員與外部的「學術達人」展開競爭。
在接受《科德角時報》(伍茲霍爾本地的一家報紙)的採訪時,巴拉德預言:「載人潛水器終將衰亡。」後來,巴拉德說他為自己做出的這個判斷感到「後悔」,但他仍然認為,在「阿爾格」發現「泰坦尼克」號殘骸之後,『阿爾文』號團隊受追捧的程度有所減弱」。
不久之後,巴拉德就發現自己的預言錯了。
為了尋找隨著「天蠍」號潛艇墜入深海的核武器,美國海軍提供了一筆資金,請巴拉德的實驗室把「小傑森」送到核潛艇殘骸內。1986年,巴拉德打著進一步調查「泰坦尼克」號殘骸的旗號,安排「小傑森」開始執行這項秘密計劃。「阿爾文」號負責將放在船艙床下的扁平行李箱大小的「小傑森」送至失事現場。「小傑森」被置於「阿爾文」號的前端機庫中,到達目的地之後由機庫駛出,進入核潛艇殘骸內部。機器人身上連接了光纖電纜,一名操控者坐在「阿爾文」號艙內,通過這根電纜遙控機器人,同時操控攝像機拍攝視頻。在利用遙控水下機器人對核潛艇殘骸進行了初步勘查之後,「阿爾文」號團隊開始受邀參與正式的勘查活動。
一度是業界新星的「阿爾文」號躍升至權威地位。1973年,一個正式的「阿爾文」號評審委員會制定了程序,對同行評審請求、潛艇上時間分配等內容進行了規範。1984年,貨真價實的海洋科考船「阿特蘭蒂斯II」號取代臨時的支撐平台「露露」號,成為「阿爾文」號的母船。截至1986年,「阿爾文」號有記錄的下潛活動就超過了1 700次,證明它確實是值得信賴的科研工具。僅在1986年,「阿爾文」號就為多個科研領域的用戶完成了100多次下潛任務。在將耐壓球狀外殼的製作材料改成鈦之後,「阿爾文」號的下潛深度達到了4 000米(13 000英尺)。
同樣是在1986年,技術人員對「阿爾文」號的電子設備進行了全面翻修,將用於推進、控制潛水器的液壓發動機更換成直流無刷發動機。從此以後,操控人員在控制單個發動機時無須再撥動開關,而是用上了真正的操縱桿。操控者威爾·塞拉斯回憶說:「經過這次改裝,『阿爾文』號徹底改頭換面。」隨後,在「泰坦尼克」號失事地點,他第一次使用了改裝之後的「阿爾文」號。
相比之下,「小傑森」還只是一個放不開手腳的新貴。它剛剛問世,幾乎沒經過任何測試,也沒有在深水區工作過。被安裝到「阿爾文」號上僅僅三天,「小傑森」就隨著母船從伍茲霍爾港口出發了。馬丁·鮑恩回憶說:「它從3米深的水域(測試階段),一下子就進入了4 000米深的水域。」
在公開對載人潛水器出言不遜之後,巴拉德感覺自己在「阿爾文」團隊成員的眼中就如同一隻落荒而逃的狗。顯然,「阿爾文」號團隊中的某些人也有同感。在前往下潛地點的路上,「阿特蘭蒂斯II」號的廚師為巴拉德做了一個特殊的蛋糕,上面寫著巴拉德說過的話:「載人潛水器終將衰亡。」就這樣,他們以一種非常輕鬆卻充滿敵意的方式,讓巴拉德「收」回自己說過的話。
儘管「阿爾文」號團隊以這種方式羞辱了巴拉德,但在一系列的下潛任務中,載人系統的支持者與無人系統的擁躉之間矛盾仍然很深,緊張的關係不僅沒有得到緩解,反而越發嚴重。
巴拉德認為,「阿爾文」號團隊對遙控水下機器人持懷疑態度。在幾次下潛任務中,他覺得「阿爾文」號的操控者拉爾夫·霍里斯常有冒險之舉,目的是證明載人潛水器探測失事現場、採集數據的能力並不弱於「小傑森」。不過巴拉德發現,「阿爾文」號的工作程序非常陳舊過時。比如,每天下午3點左右,載人潛水器必須離開海底,團隊成員才趕得及回母船上吃晚飯。這樣的安排是出於安全考慮,也是為了讓團隊成員得以休整和進行夜間設備維護。但是,巴拉德認為這是「極度僵化的官僚主義,毫無疑問還摻雜了對同行的妒忌之心」。在他看來,「『小傑森』正在證明無人水下機器人比載人潛水器的功能更加優越」。
「阿爾文」號的工作人員在接受各類採訪時絕口不談這種比較,他們對團隊的權威地位充滿信心。在他們眼中,遙控水下機器人就是一個令人討厭的劣質玩具。
他們的感覺是正確的。鮑恩在回憶他們的第一次潛水活動時說:「『阿爾文』號的操控者準備啟動『小傑森』。可是,剛一接通線路,這個傢伙就出問題了,後面升起一小股白煙。」原來是接線盒發生了短路,推進器無法工作。有一次,在「阿爾文」號回到水面的過程中,「小傑森」從「阿爾文」號的機庫中掉了出來,吊在「阿爾文」號的下方來回擺動,真成了「拴在繩子上的小玩具」。他們不得不派出潛水員割斷電纜,才找回了「小傑森」。在全部12次下潛活動中,「小傑森」成功地獲得有價值的視頻次數。
「阿爾文」號第一次下潛至4 200米的深度,所用時間大約是2.5個小時。巴拉德與鮑恩盤腿坐在那兒,膝蓋上放著好多盤錄像帶,準備用來記錄「小傑森」的重要發現。潛水器將下潛到失事現場附近,然後慢慢靠近,直到巨大的目標出現在聲吶圖像中。然後,在進入可視範圍之後,「你就可以透過舷窗,看到一幢8層樓高的大傢伙,而你所在的位置與停車收費器差不多。因此,這個龐然大物彷彿正在慢慢地爬到你的頭上」。
巴拉德的夢想是操控「小傑森」沿著「泰坦尼克」號的大樓梯走下去,同時用視頻記錄下整個探測過程。這就要求「阿爾文」號與機器人「小傑森」之間有默契的配合。「阿爾文」號必須停在「泰坦尼克」號的甲板上,還必須略微負重才能構成一個穩固的平台。甲板能承受得住嗎?會不會崩塌並埋沒「阿爾文」號與「小傑森」呢?操控者拉爾夫·霍里斯試了一次,發現甲板比較結實。
第三次下潛時,做過機械工程師和海軍飛行員的操控者達德利·福斯特(後來,他成為在「阿爾文」號團隊工作時間最長的人)讓潛水器停在甲板上,它攜帶的重量大約為94克。之後,福斯特必須讓它慢慢前進,盡可能靠近大樓梯上的一個孔,這是因為「小傑森」電纜的長度只有大概45米。「阿爾文」號的舷窗向下傾斜45度角,因此操控者在潛水器正前方的可視範圍並不大。福斯特回憶說,在他足夠靠近之後,「我的視野裡只剩下前窗外面的那個大洞了」。
鮑恩的腿上放著一個控制盒。控制盒右側的手指操縱桿可以讓潛水器水平運動,左側的撥動開關可以調整潛水器的俯仰角度,中間是一個索尼便攜式電視「隨身看」樣機,用來播放「小傑森」的前位攝像機拍攝的黑白視頻影像。
巴拉德焦躁不安地坐在「阿爾文」號的球體結構中,鮑恩則全神貫注地盯著他那台索尼「隨身看」。鮑恩小心翼翼地操控「小傑森」從機庫中駛出,然後慢慢地摸索前進。如果速度過快或者碰到船體,就有可能揚起塵土,導致他迷失方向。
所有人都知道,「小傑森」是一台先進的機器人,但稍有疏忽,它就會變成一個造價昂貴卻有致命危險的鐵錨,把「阿爾文」號及其成員困在海底。人們為緊急關頭切斷電纜配備了一把電纜鉗,但是所有人都不確定這個辦法是否保險。鮑恩回憶說:「如果我操控水下機器人帶著這種結實的電纜的水下機器人進入船體內部,一旦它熄火或者發生其他災難性故障,我們就會被困在那裡。」甚至有可能永遠留在那裡。
有一次,這根直徑約1.25厘米的明黃色電纜真的鉤到了一根斷裂的欄杆上。但是,鮑恩並不知情。在他扳動開關準備收回電纜時,「小傑森」沒有回到潛水器上,而是被電纜拖向那根欄杆。潛水器與有纜遙控機器人形成了一個耦合動力系統,而且是一個由載人系統與遙控系統構成的耦合系統。現在,載人系統與無人系統之間的矛盾通過這根繃緊的電纜凸顯出來。鮑恩意識到自己犯了一個錯誤,於是他鬆開絞車,然後輕輕地拉動電纜,讓遙控機器人朝側面移動了一小段距離,趁勢擺脫了那根欄杆。
儘管出了一些小問題,但「小傑森」還是成功地垂直下降並進入大樓梯上的那個孔。在這個過程中,鮑恩一直全神貫注。他說:「我通過水下機器人的攝像頭,一邊看著樓梯下方的柱子,一邊努力地讓機器人做著後退、前進的動作……就像玩遊戲一樣。」與此同時,「阿爾文」號上的操控人員則負責監控水下機器人的各個系統與傳感器。
鮑恩不僅要密切關注遙控機器人前方的情況,還要滿足載人系統的各種要求。他回憶道:「負責監控的操控人員不斷發出各種指令,要麼是『讓那個傢伙回到這兒來!』,要麼是『我們完成任務了,現在離開那兒。把絞車打開』。巴拉德也會不停地發出指令,諸如『不錯,一切都算順利。去那兒,去那兒。檢查那個地方』。我需要在這些指令中做出取捨。」
不過,這還是讓他激動不已:「我就這樣操控著這個小傢伙。我的大腦已經離開了潛水器,進入了那台攝像機。」當時,他操控的機器人正在水面下近4.8千米處的巨大沉船內部。20年後,操控無人機飛抵阿富汗上空的美國空軍人員,還有操控遙控機器人勘探火星的地質學家,也有類似的感覺。
有一次,鮑恩讓「小傑森」轉過身,面朝「阿爾文」號。他回憶道:「我們都坐在『阿爾文』號艙內。突然,明亮的光柱在我們眼前閃過,就像在漆黑的夏夜,一輛汽車開著明亮的前車燈,從窗外的黑暗中疾馳而過一樣。所有人大吃一驚,恨不得拔腿就跑:啊!這是什麼怪物?原來,我們看到的就是我們自己。當時,我們正在試圖搞明白我們到底是誰。」在另一次下潛過程中,操控人員威爾·塞拉斯發現,把「小傑森」當作一組遠程控制的照明燈使用的話,從舷窗看出去的有效視距會大大增加,這個發現令他驚歎不已。
沿著樓梯的下潛活動才進行了20多分鐘,福斯特就決定收工回去吃晚飯了。他下令收回遙控機器人,然後讓「阿爾文」號回到水面。不過,他們已經有了不小的收穫,用視頻記錄了整個勘探項目中最關鍵的20分鐘。
《國家地理》雜誌為「阿爾文–小傑森」組合做了一期特刊。此外,畫家以藝術手法為「阿爾文–小傑森」創作的「畫像」也登上了《時代週刊》的封面。奇怪的是,人們從《時代週刊》的封面上只能看到「阿爾文」號。許多人都以為發現「泰坦尼克」號殘骸的是「阿爾文」號,可能就是出於這個原因吧。與之不同的是,在《國家地理》雜誌的封面上,我們只能看到「小傑森」正停在「泰坦尼克」號的一扇窗戶外窺探船體內部的情景。
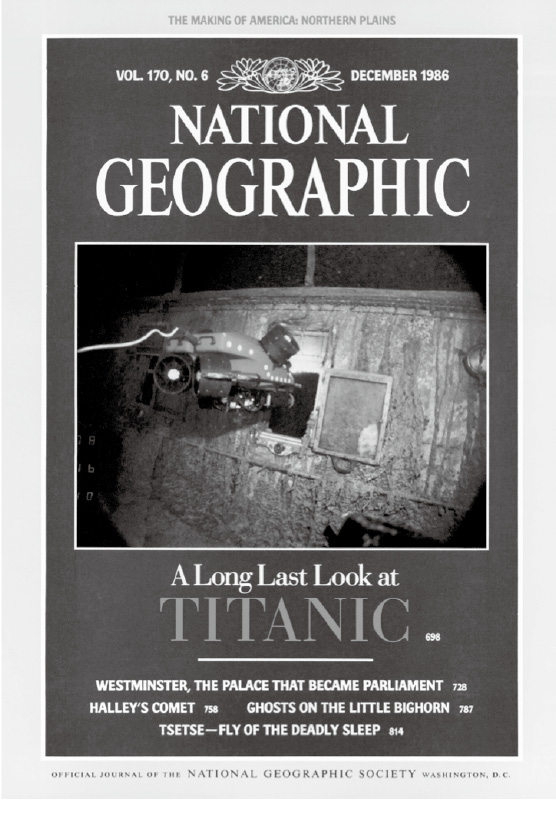
圖2–3 1986年,「泰坦尼克」號探測活動讓人類親臨現場與遠程臨場之間的矛盾在媒體上暴露無遺。圖中是《國家地理》的封面,描述的是小型機器人「小傑森」正在透過一扇窗戶窺探「泰坦尼克」號的內部。與之不同的是,《時代週刊》的封面上只有「阿爾文」號潛水器,儘管「小傑森」也參與了此次探測活動
圖片來源:美國國家地理學會。
「泰坦尼克」號船體內部的探測工作使大眾對深海與機器人技術的潛力浮想聯翩,這與一年前發現失事地點時的情況非常相似。幾年後,詹姆斯·卡梅隆用戲劇化的手段再現了「泰坦尼克」號船體勘查的情景,並用在電影《泰坦尼克號》(Titanic)的開頭。在那部電影裡,機器人不僅打開了通向沉船內部的窗戶,還把吸引它來到海底世界的那個故事展現在世人眼前。
在「泰坦尼克」號周圍和內部探索的「小傑森」具有某種象徵意義,它標誌著被比喻成「左顧右盼的眼睛」的早期深海機器人技術已經發展到了巔峰階段。這些「眼睛」大有作為,甚至可以幫助人們擺脫危險。例如,在「阿爾文」號前往十分狹小、足以威脅整個潛水器安全的地方執行探險任務時,「小傑森」可以代替人們承擔這些風險。不過,這些與「阿爾文」號早期承擔的各種任務並無本質區別。在聲學導航與科學新方法使之成為名聲顯赫的、可以生成正式數據集的科研工具之前,「阿爾文」號執行的不過是「去看一看」的任務。
載人潛水器與遙控機器人的組合併沒有讓「阿爾文」號團隊從此變得炙手可熱,在完成「泰坦尼克」號探險活動之後,這個組合再也沒有派上用場。
要借助「阿爾格–傑森」組合實現海底遠程臨場這個目標,巴拉德和他的實驗室還要繼續努力。在隨後的幾年,全尺寸版「傑森」逐漸成形,並通過了一系列淺水測試。「阿爾格」由橇狀照相機裝置變成了全尺寸的機庫,可以容納一輛大眾汽車大小的「傑森」機器人。新的「阿爾格」被命名為「雨果」,意指「大號的阿爾格」。「雨果」採用由長途通信系統改裝的光纖電纜,可以每秒幾千兆字節的速度傳輸數據,而且數據的質量不受影響。
不過,遙控機器人對深海研究的作用並不僅限於充當「左顧右盼的眼睛」,它們變身為移動數字感測頭,以極快的速度從海底世界收集大量數據並傳送至水面。這些機器人既不是全自動的,也不是全手動的(沒有「阿爾文」號的那種撥動式開關),而是通過戴納·約傑等人為「傑森」開發的監控系統來操控。幾乎所有的「智能機器」都要待在海面上。「傑森」其實就相當於一個平台,負責為「平台」上的所有照相機和傳感器提供電力、遙測技術和動力。
1988年9月,「傑森」在美國華盛頓普吉特海灣的胡德運河執行了它的第一次出海任務,為美國海軍完成淺海勘查工作。1989年春天,「傑森」在地中海完成了一個地質考察項目(下一個就是「謝爾克4號」的探險工作),這是「傑森」在深海區完成的第一項任務。
巴拉德滿懷激動地看著10年的艱辛付出終於有了成果,但是這種心情並沒有持續太長時間。下水之後,「雨果–傑森」組合表現出體積大、重量輕的缺點。在母船上下起伏時,前一刻電纜鬆弛下來,下一刻又突然繃緊。在巴拉德為之驕傲的「雨果–傑森」系統第三次下潛時,連接「雨果」的電纜末端突然斷裂,導致整個系統悄無聲息地沉到了800米(2 600英尺)深的海底。或許,人們會因為這次事故而萌生遙控機器人不如載人潛水器安全的想法。
通過一系列勇敢的措施,DSL實驗室終於把「雨果」與「傑森」從海底打撈上來。「雨果」被永遠捨棄了,取而代之的是一個小型照相機裝置,名為「美狄亞」(神話人物傑森殘忍的妻子)。時至今日,這個照相機裝置仍在使用。「美狄亞」不僅是「傑森」的庫房,而且可以起到平衡水面母船通過長電纜傳過來的拖拽力。連接「傑森」與「美狄亞」的是一根懸浮電纜,只有約45米長,在這個半徑範圍內可以自由、精準地完成各種動作,而且海面母船的上下起伏不會對它產生任何影響。「美狄亞」還裝有攝像頭和導航系統,在「傑森」工作時可以在其上方對其進行監控。
令人意想不到的是,這些臨時性的改進給「阿爾格–傑森」系統賦予了一些不同於載人系統的特點。在被認證為安全的載人工具之前,「阿爾文」號還必須接受美國海軍的多項嚴格測試,包括船體建造材料的來源追蹤、工程變更的審批(只能在一年兩次的大修時才能啟動審批程序)。截至目前,「阿爾文」號這艘關乎人類生命安全的系統上沒有安裝任何軟件。它還是一個傳統意義上的硬件系統,既簡單又安全。
遙控水下機器人的情況則與之不同。所有遙控水下機器人無須進行任何認證,可以在使用現場方便地改裝,而且費用低廉。此外,因為軟件也不需要認證,所以也可以在操作過程中不斷修改。在最開始的幾年,「傑森」接受過無數次的硬件改裝,軟件的更新也從未停止。早期的「傑森」機器人經常出現軟件衝突的問題。如果「傑森」是載人系統,有的軟件衝突甚至會威脅到人的生命安全。
1988年夏天,即「泰坦尼克」號探險活動結束兩年後,我來到伍茲霍爾海洋研究所洽談工作事宜。研究所的大門外有一個不大的牌子,上面有「深潛實驗室」幾個字。我沿著陳舊的綠色鋁質樓梯走了進去。負責接待我的斯基普·馬凱特曾是「阿爾文」號團隊的一名元老級工程師,也是深潛實驗室的聯合創始人之一。在參觀實驗室時,我不僅看到造型獨特的機器人、耐壓外罩,還看到了一些從未見過的東西。馬凱特指著實驗室長椅上的一堆電子元件告訴我:「這個傢伙曾經進入了『泰坦尼克』號內部。」他說的是「小傑森」,不過現在它已經面目全非了。
但是,在這些機器人身上和它們的周圍,我也看到了一些非常熟悉的東西,包括各種電子元件、微處理器和軟件使用手冊等。一瞬間,我就被眼前的這些東西深深地吸引住了。我所掌握的技能、我的激情,不正適合投入到這個不同尋常的事業中來嗎?我不願意困於斗室撰寫工作報告,我迫切地希望周遊世界,同時利用自己的工程技術製造可以在極端環境下工作的電子元件。於是,我加入了深潛實驗室,成為一名初級工程師。
在「傑森」的基礎系統通過驗證之後,戴納·約傑終於可以轉移注意力,去開發輔助遠程探險的更先進的監控技術了。他邀請我幫他研發電子元件,為實現自動化植入必要的系統。具體地講,我需要完成兩項工作:其一是開發一套利用超聲波脈衝信號為「傑森」導航的精確導航系統;其二是為一個叫作ABE的新型自主水下機器人研發計算模塊(我同時還要參與完成「傑森」系統其他方面的工作)。在隨後的幾年裡,我們用「傑森」機器人完成了幾個項目。每次,我們都會編寫新的代碼,利用控制系統完成新的任務,與此同時,我們對遠程探險也會產生新的認識。
在深海中作業的機器人到底有什麼特點呢?首先,我們必須對「機器人」這個詞的使用加以限定。我們經常用這個詞來代表「傑森」,但是「傑森」的自主性與機器人不可同日而語。事實上,「傑森」在技術自主性方面就像一張「白紙」。它幾乎沒有計算能力,能夠勝任的只是控制燈與工具的開關、打開推進器,以及為數不多的其他整理工作。視頻信號由光纖直接傳送至水面處理,各種工具收集的數據大多是通過「傑森」身上的計算機多路傳送。即使「傑森」自動完成某些動作(諸如保持在某個固定的深度上),其反饋環路的關閉也是通過母船上的計算機完成的。
從外形上看,「傑森」的造型並不美觀,與人類也沒有多少相似之處。它的上半部分是一個結實的塊狀結構,由特種發泡材料製成,以便產生浮力。它的下半部分由金屬條、耐壓外殼和各種電線構成。各部件由管道膠帶和喉箍固定在一起。
儘管這個機器人有一個人類的名字,但是它並不具備多少人類的特點。不過,如果仔細端詳它的正面,就會發現這個密集安裝了大量照相機的部位(完成所有工作的機械手也在這個部位)的確與人臉有幾分相似。更準確的比喻是把「傑森」比作望遠鏡,因為人們借助它可以看清遠處的東西。事實上,在任務進展順利的時候,人們是看不到它的。它讓水面上的人能夠看清海底的情景,同時不讓他們注意到傳送信號的媒介,這正是營造臨場感的關鍵。
「傑森」還讓機器人與海面艦艇(最古老的載人移動工具之一)建立了一種更親密的關係。在「阿爾文」號下潛之後,母船上的工作人員可以隨心所欲地駕船離開,去收集其他的研究資料。而有了「傑森」之後,母船與機器人始終通過電纜連接在一起,在協同作業時必須力求精確。我們在控制室與母船的定位系統之間建立了電腦連接,這樣一來,在位於母船後甲板的「傑森」控制室裡的工作人員就可以控制母船了。只需輕輕敲擊電腦鍵盤,就可以讓母船朝前或者向後移動幾米,或者沿著一條筆直的航跡線緩慢前行。
母船下方是長長的電纜,然後是「美狄亞」,再然後是「傑森」。我們需要瞭解的數據非常多,都會通過導航屏幕顯示出來。導航屏幕使用的軟件由戴納·約傑編寫,每次出海之前他都會根據任務做適當調整,在航行過程中也會不斷加以修改。馬丁·鮑恩說:「它就是一個芭蕾舞劇團。」馬丁·鮑恩認為,這套系統與電子遊戲非常相似,只不過每次投進去的不是一枚枚硬幣,而是上千美元。
「傑森」控制室的牆壁上安有五六塊6厘米的視頻和電腦監視器,用來顯示從「傑森」的多個攝像頭傳來的影像與導航數據。監視器下方是一排控制台,包括操控人員的控制台、工程師用來監控水下機器人的各個系統和電纜絞車的控制台,還有導航控制台。有一個數據記錄器負責更換錄像帶,記錄所有活動。除此之外,控制室裡就沒有其他設備了,顯得很寬敞。科研負責人通常就坐在操控人員的身後,指揮水下機器人的活動。室內還有10~20人,包括科研人員、工程師、研究生和媒體的攝影團隊。
不過,在情況穩定時,控制室裡的所有人都會把注意力集中在海底世界。鮑恩說:「這時候,我們就進入了遠程臨場的狀態。我會忘我地關注海底的動靜,小心翼翼地指揮水下機器人『跳出美妙的芭蕾』。」
操控人員發現,這種置身海底的感覺與乘坐「阿爾文」號下潛到海底非常相似,但是他們操控水下機器人的物理環境卻與「阿爾文」號大相逕庭,控制室裡的人員較多,容易讓人分心。由「阿爾文」號操控者改任「傑森」操控者的威爾·塞拉斯說:「各種輸入數據讓人目不暇接。顯示屏已經給我提供了大量信息,但在操控機器人時,我的身後還有一大群專家。這邊有一個傢伙在發號施令,那邊還有兩個傢伙也在不停地指手畫腳……他們來自不同的學科領域,都希望做出自己的貢獻。因此,我必須消化整理所有信息,然後確定水下機器人的下一個行動目標。」
操控人員掌握了一個訣竅:只聽取關鍵幾個人的意見。如果指南針出現問題,或者海面天氣惡劣,操控人員就需要詢問導航員的意見。我負責領航工作,並且已經學會在操控人員有需要的時候為他提供適當的信息:對母船位置稍加調整;請通報通航等級;小心,你靠得太近了。慢慢地,操控手就會在大腦裡形成一幅地形圖。「我開始在心中默想周圍的情況。有哪些障礙物,我需要保持什麼樣的高度和多慢的速度……周圍有那麼多人幫助我,這是我的一大優勢。」就這樣,在海洋深處並肩作戰多年之後,我與馬丁·鮑恩建立了親密的友誼。
借助新的光纖電纜、數字傳輸技術以及傳輸質量優異的視頻攝像頭,我們來到了另外一個世界。但是,被巴拉德稱為「遠程臨場」的狀態並不僅僅是技術成像的產物。事實上,按照現在的標準,當時的成像技術還非常原始,分辨率僅相當於老式彩色電視機,遠夠不上數字高清的標準。
人類在海底世界的臨場感,與他們在那間漆黑的控制室裡從事的活動有密切的關係。「傑森」在沉船現場、熱液噴口等地發出脈衝信號或者拍照時,控制室裡的那些人密切觀察、討論、思考攝像頭和傳感器傳送回來的影像。這種針對正在進行的探險活動展開的不間斷的實時研討,再加上我們眼前的那些美妙影像,將我們送到了另外一個世界。從本質上看,這與「阿爾文」號帶給我們的體驗有天壤之別。
有時候,你會因為控制室裡的人不小心碰到你的椅子,而錯以為水下機器人撞到了岩石。等到你「醒過來」,就會發現是你的身體欺騙了你的大腦。這種體驗在載人潛水器上是無法複製的,只有水下機器人才會給我們這種錯覺。海底世界的很多地方,儘管我們的身體從未去過,但我們的大腦和想像力卻在那裡逗留了很長時間,對那裡的風景也瞭然於胸。
在這些變化發生的同時,專業領域也因此產生了矛盾。例如,考古專家習慣於親手挖掘或者親自潛到海底,一旦不能親自到達現場,他們就會感到無所適從。我們頗費了一番口舌才讓他們相信,坐在操控人員的座椅上拉動操縱桿親自操控「傑森」機器人並不是充分發揮他們聰明才智的最佳方式。
「傑森」當然不是考古專家,它的作用只是通過電纜將獲取的數據傳送至水面。工程師和程序員們會根據這些上傳的數據繪製地圖和拼圖,但是如何解讀,就只能由考古專家來完成。考古專家們並不是用自己的身體勘查海底,而是坐在電腦屏幕前,通過數據分析來完成探險任務。有的考古專家認為這是了不起的變化,有的則不以為然。
職業認同的問題並不限於考古專家與科研人員。在一次探險活動中,攝影師也遇到了職業認同的問題,最終以一種荒謬可笑的方式平息了下來。當時,我們在靠近愛爾蘭海岸線的一個水域勘查「盧西塔尼亞」號的失事現場,隨隊的一名攝影師來自《國家地理》雜誌。作為知名雜誌的成員之一,所有可以想見的傲慢與自負在他身上都有體現。這位攝影師在船上四處走動,用鏡頭捕捉水面上的各種操作。他知道海底發生的一切才是最重要的,但他不大可能拍到海底的活動(而且任何海底活動的照片版權都不可能歸他所有)。
於是,這位攝影師提出由他親自操控水下機器人拍攝一些照片,但鑒於他沒有經過專業培訓,也沒有相關的技術背景,操控人員與項目負責人都認為這可能會導致危險,因此拒絕了他。但是,《國家地理》雜誌是這次探險活動的「客戶」之一,支付了大筆的拍攝報道費用,因此他們有一定的發言權。