人類與機器人如何合作,是我們當下乃至未來面臨的一個至關重要的問題。
載人、遙控和自主技術共同演化,三者之間的界線逐漸模糊。
「水下機器人先驅ABE去世,享年16歲。」
——《紐約時報》,2010年3月15日
自主型深海潛水器(ABE),是唯一由《紐約時報》為其刊登訃告的水下機器人。它是一台大小與小型汽車相仿的機器人,是為完成深海探測而設計的。
事故發生在智利海岸線以外的深海之中,原因可能是海水的壓力作用導致水下機器人ABE的耐壓艙發生內爆。1996年,水下機器人ABE首次執行海底測繪任務,至事故發生時,正在執行第222次下潛任務的ABE已經處於「半退休」狀態。人們決定用更先進的水下航行器「哨兵」號來取代它。水下機器人ABE的毀滅令當時正在附近一艘海洋調查船上監控它的發明者們心情沉痛,但這次事故本身也證明了ABE的價值,因為沒有一個人在這次事故中喪生。
1989年,我在伍茲霍爾海洋研究所工作時,參與的就是水下機器人ABE項目。最初,水下機器人ABE接受的任務是下潛至熱液噴口群附近的海底,然後利用某種鎖扣裝置,長期停留在那裡。按照計劃,ABE會定期「甦醒」(也許是一個月裡每天一次,或者是一年裡每月一次),對熱液噴口區進行精密勘查,測算數據,拍攝照片,記錄異常地質特徵與生態系的興衰過程。在完成了ABE早期的計算機設計工作之後,我轉而從事其他項目,ABE項目的主要參與者戴納·約傑、巴裡·瓦爾登和艾爾·布拉德利則留下來,小心地呵護著ABE走過漫長的成熟期。
但是,ABE從未執行過當初設計的任務,而是以前所未有的精度繪製了海底世界的地圖。也就是說,它一邊沿著筆直的航跡線在寬闊的海底世界來回運動,一邊收集海量的地形數據。約傑回憶說:「我們在設計的時候從未想過讓ABE沿直線運動,但是我們必須根據具體情況調整我們的計劃。」當時,科學家們希望把寶貴的資金用於繪製適合地質勘查的地圖,於是ABE團隊做出了相應的調整。
ABE並不是載人潛水器「阿爾文」號的替代品,而是與後者一起發生了某些演變。巴裡·瓦爾登是ABE團隊的三名主要工程師之一,也是伍茲霍爾海洋研究所「阿爾文」號團隊的負責人。ABE在執行早期下潛任務時,大多是跟隨「阿爾文」號一起出海的。夜間,「阿爾文」號在母船甲板上充電,ABE則離開母船執行下潛任務。有一次,ABE無法返航,「阿爾文」號還參與了救援工作。
在1999年前往東太平洋海隆執行任務的途中,他們駛過復活節島兩天之後,麻煩就接二連三地出現了。約傑本來計劃跨越洋中脊測量並集合一批聚磁數據。但是,工程師出身的地質學家比爾·瑞安一再要求約傑不要僅限於局部測量,而是安排ABE完成更多的系統勘查。ABE下潛到2 600米(接近8 500英尺)的深度,在崎嶇不平的火山地形上方約20米(65英尺)的水域中前進,同時採集聲吶數據和影像資料,並於天亮前返回海面。約傑發現,如果動作快,他還有足夠的時間下載數據、繪製地圖、完成初次剪輯,並在科研人員於第二天上午乘「阿爾文」號潛入海底之前,將打印好的地圖交給他們使用。
由於時間還有剩餘,約傑就將8次下潛任務的航跡線集中到一幅地圖上,覆蓋了1公里×4公里的海域。約傑至今還記得,在他將這幅地圖遞給冰島地質學家卡爾·格倫沃爾德的時候,他忐忑不安地問道:「你看這幅地圖怎麼樣?」格倫沃爾德沒有吭聲。約傑回憶說:「所有的地質學家幾乎都這樣。如果你遞給他們一幅地圖,而他在兩分鐘之內一言不發,就說明你打動他們了。」格倫沃爾德沒有吭聲,是因為他正在分析地圖的一致性、樣式和地質特徵等細節。然後,他抬起頭看著約傑,說道:「我已有的所有冰島地圖都比不上這一幅!」就這樣,自主機器人通過向人類科研人員提交數據,證明了自己的價值。
有史以來,第一次科學家們可以拿著一幅真正的地圖,乘坐「阿爾文」號下潛到海底深處探測崎嶇不平的火山地形。回想過去,人們數百次乘坐「阿爾文」號前往熱液噴口區,竟然沒有人繪製這些地域的地形圖,這確實讓人費解!自主機器人提供的量化地質測繪圖,為「阿爾文」號的浸入式野外地質勘查做出了貢獻。
在取得這次重大突破之後,ABE在隨後10多年的時間裡又完成了更多的地質測繪工作,在導航精度、數據密度和圖像質量等方面不斷進步。它的溫度與化學傳感器甚至能探測到從熱液噴口升起的熱液柱,因此,2004年,約傑和同事們想出了利用這些數據引導ABE發現新熱液噴口的方法。
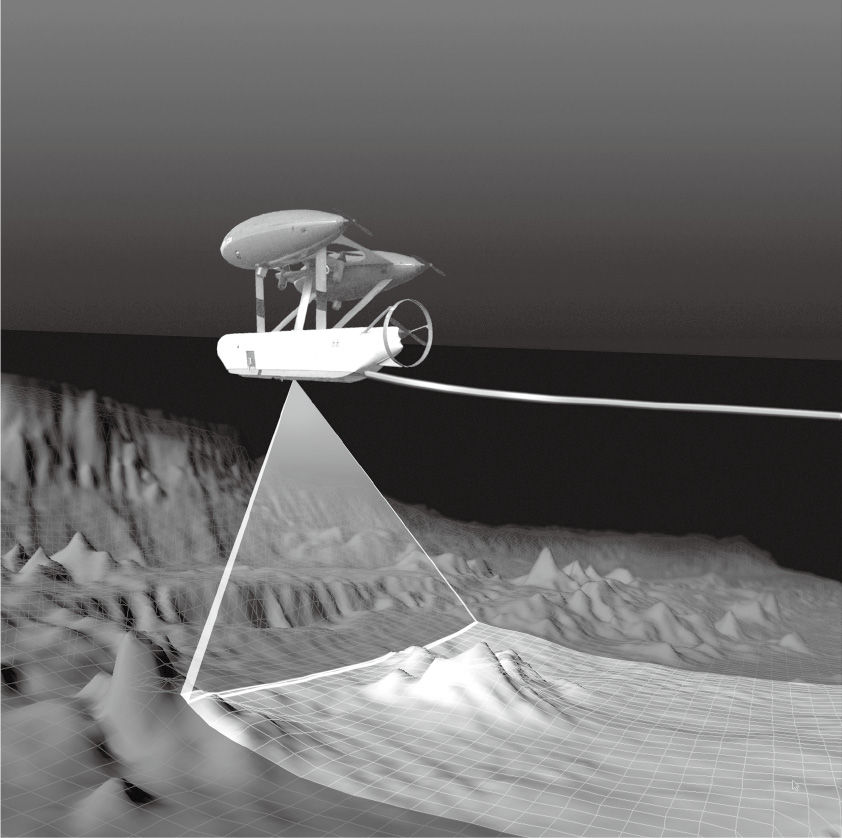
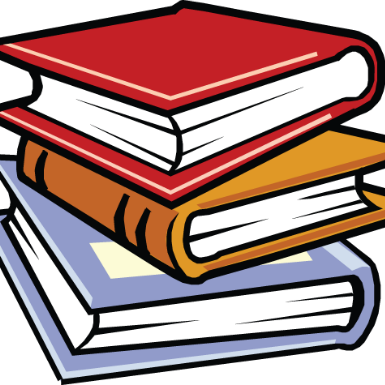
圖6–1 正在熱液噴口區上方沿著勘查航跡線進行深海精密測繪數據採集的自主型深海潛水器(ABE)。圖中是ABE利用掃瞄聲吶探測熱液柱的情形,ABE後方的陰影線表示它測量的溫度和化學數據
圖片來源:華盛頓大學環境可視化中心。
接替ABE的水下機器人「哨兵」號就是針對這個任務設計的。在2010年「深水地平線」漏油事件發生後,「哨兵」號利用與ABE相類似技術,對馬康多深水井噴出的水下油柱進行了測繪。結果顯示,大多數的溢出石油並沒有被海水沖上岸,而是懸浮在海面下,形成了一片巨大的「雲」。
水下機器人ABE的自主性是如何形成的呢?在勘查一些複雜地形時,「傑森」等遙控機器人面臨著重重困難,在這種情況下,「阿爾文」號有可能遭遇危險,而ABE不帶電纜,操控非常自由,因此可以抵近勘查。ABE身上有大量的巧妙設計,就是為了讓它避開所有障礙,安全地完成任務並順利返航。在遇到麻煩時,它也有辦法浮出水面並請求幫助。不過,它的基本航徑都非常簡單,通常是沿著筆直的航跡線前後運動,以最大可能地覆蓋整個區域,確保不留死角。就像我們前面設想的登月機器人「跳躍者」思維實驗一樣,探索活動實際上仍然是由科研人員完成的。他們通過仔細閱讀各類資料,解釋測繪數據的含義,來實現遠程臨場。
而且,隨著聲學通信技術不斷進步,ABE深海探索的自主性實際上正在逐漸減弱。在水下機器人ABE完成的早期下潛活動中,它偶爾會發出聲學脈衝信號來表示自己仍然在正常工作,或者海面上的人發出一個聲學編碼以取消任務,除此之外,就再也沒有人力投入了。工程師裡奇·卡米利回憶說:「我們還可以查看水面追蹤儀。除此之外,我們沒有其他辦法去瞭解海面下的情況。」
不過,水中傳遞數據的能力逐漸得到了發展。老式的電話調製器可以把計算機數據轉換成一堆「畢畢剝剝」難聽的聲音,而水下聲學調製解調器則可以類似方式和差不多的速度,在水下將數據包傳遞至幾千米以外的位置。通過這些調製解調器,ABE等自主遙控機器人可以上傳文本信息等數據包,報告自身狀況、導航信息、下潛深度、電池續航時間,甚至還可以上傳傳感器探測的科研數據和圖像等。與此同時,海面上的科研人員也可以通過向水下機器人發出新指令的方式,調整探測活動的計劃安排。
在2009年的一次下潛活動中,ABE的機載主導航陀螺儀發生了故障。為了繼續執行這個頗具價值的潛水任務,海面上的工程師通過速度很慢的鏈路,用「操縱桿」向水下機器人發出一些簡單的指令,指揮它每次沿著某個方向前進幾米(與20世紀70年代蘇聯工程師通過操縱桿指揮Lunokhod月球漫遊車的方式非常相似)。接下來,科研人員需要考慮的問題不是如何增強系統的自主性,而是如何設計新的顯示裝置和算法,進行實時數據分析。
與地球到火星的通信一樣,水下聲學通信也有局限性。比如,水下聲學通信的帶寬非常有限,只是尋常咖啡店無線保真(Wi–Fi)帶寬的零頭,通信的時滯要以秒為單位來計算,與從地球發射無線電信號到月球上所需的時間差不多,甚至更長。儘管ABE與「哨兵」號的操作人員希望與水下機器人始終保持聯繫,但是在長時間的下潛任務中,他們寧願將母船開走,去完成其他工作。在這種情況下,水下機器人的自主程度就更高了。
即使水下機器人在整個下潛過程中都不與人發生聯繫,它們依然會定期回到母船上。在水下機器人下潛到海底時,工程師們往往認為這時自主機器人技術就開始發揮作用了。但是,從廣義上看,探索系統是由載人機器(船)和無人駕駛機器構成的,後者被前者派出去之後,就進入了自主作業階段,直到它再次回到前者那裡,以交換數據、獲取能量和接受指令。就像法航447號航班的搜救工作一樣,自主機器人的工作是週期性的,需要人類的定期調整,同時對位置、帶寬以及一系列其他因素都有依賴性。這些情況再一次說明,自主機器人技術離不開具體的情境。
詹姆斯·金塞是深潛實驗室的一名年輕的工程科學家。剛到實驗室工作時,他躊躇滿志,希望研發出自主性更高的機器人。他建立了越來越複雜的模型,模擬從熱液噴口噴出的熱液柱向整個海洋蔓延的情景,並試圖指示機器人根據傳感器微妙的探測結果下潛到海底,勘查這些熱液噴口。不過,隨著時間的推移,金塞發現,「為機器人賦予過高自主性的做法可能從一開始就有問題」。海洋探索的特性決定了他們必然會遭遇任務界定模糊、環境複雜多變等問題。事先編好的程序相當於一個個假設,是模擬世界運行規律的模型,但是在現實環境中,這些模型卻未必有效。金塞說:「我想,這種做法或許是沒有找準自主機器人技術的關注點……我們要求機器人掌握周圍環境的大量信息,這個要求可能太高了。」自主機器人技術的抽像概念與實際應用之間的碰撞,曾經令那位火星漫遊車工程師莫名驚詫。無獨有偶,金塞也有相同的感受。
金塞發現:「讓機器人自己做決定會有很多問題,比如,我們無法隨時瞭解它到底在幹什麼。即使你在監控它,有時候你也會感到莫名其妙: 『咦,它怎麼突然向西南方向游弋了?這是出故障了,還是它做出的一個決定啊?』」深海探索耗資甚巨,即使自主機器人沒有載人,也不能輕易放棄它。金塞認為:「人們都關心自己的資產。如果這些資產很昂貴,他們就會更加關心。」
而且,通信技術絕不會止步不前。比如,光通信技術越來越切實可行。光通信的主要手段是LED,通過高速閃爍在水中傳輸數據。在百米上下的短距離內,它們可以實現與Wi–Fi相媲美的傳輸速度。擁有這種技術的船隻可以懸掛一隻光調製解調器,讓它像街燈一樣懸浮在深海中。接著,自主機器人可以通過光通信迅速上傳數據。或者,海面上的人也可以在機器人進入視距範圍內的時候對它實施遠程控制,在它離開這個範圍或者光鏈路中斷時則任它自由行動。在這種情況下,自主程度隨著位置和帶寬的變化而變化。
總體來說,載人、遙控和自主水下機器人之間的界限正在不斷模糊化。目前,工程師正在設想多種機器人協同工作的海洋探索前景。這些機器人有的是載人的,有的是遙控或者自主型的,而且可以隨時切換模式。「阿爾文」號在最近一次升級的過程中安裝了為自主機器人設計的軟件,也許有一天它可以通過光纖電纜同海面上的人取得聯繫,甚至還可以變成無人水下機器人。
工程師們面臨的難題是協調所有機器,讓科研人員瞭解內情,確保機器人的行為體現的是人類的意圖。有的機器人擁有光纖電纜等高帶寬數據傳輸渠道,有的機器人的數據傳輸渠道則受到諸多限制。有的機器人迂迴到某個節點附近,快速發送所收集的數據後會再次潛到海洋深處。所有機器人都會根據人類程序員事先編好的程序,或者按指示採取某種行動,或者自行做出某些決定。
在這個新興世界裡,我們可以把自主性看作海洋中的一個形狀奇怪的三維雲團,有一些機器人正在其中往來穿梭,或進或出。接下來,假設ABE是你的愛車,這團三維「自主性雲團」是你居住的社區。在某些位置、某些場合,例如,在公路車道內,或者在一個車隊中高速行駛時,你的愛車可以擁有某種程度的自主性。而在其他場合,例如在離信號基站比較遠,或者當汽車傳感器被冰雪遮蓋時,它的自主能力有所減弱,駕駛員需要更多地參與駕駛活動。在駛進、駛出這個雲團時,你會根據情況隨時打開或關閉自主駕駛模式。
的確,無人駕駛汽車(如果100年前的人沒有用「automobile」這個詞表示「汽車」,用它來表示無人駕駛汽車倒是非常貼切)的前景引發了無數人對自主性技術的熱情和爭議。谷歌公司是這個領域最具代表性的參與者,舉行過一場組織嚴密的宣傳活動。(谷歌公司的研究大多有專利保護,因此我們在評估它的程序時只能依賴於公開評價。)
幾十年以來,汽車製造商一直不停地為自己的產品添加各種自主功能,包括自動變速器、定速巡航、防抱死制動系統等。我家的沃爾沃汽車裝有一款軟件,只要探測到汽車即將發生碰撞,就會自動緊急制動。(在駕駛這輛車時,我必須充分信任這款軟件。)總的說來,汽車製造商會不斷採用增量方式,將自動功能作為「安全性」(而不是作為自主性)推銷給消費者。梅賽德斯–奔馳汽車公司發佈了一款概念車,車的內部被設計成「移動起居空間」。在自主駕駛時,車裡的人可以閱讀,可以休息。不過,與谷歌無人駕駛汽車不同的是,在梅賽德斯公司的設想中,「乘客在虛擬與現實世界中同汽車建立了相互依存的關係,並且可以方便地相互影響」。谷歌一直宣揚的則是一種完全自主的設想。谷歌的一位工程師在比較谷歌與其他公司在處理方法上的異同點時說:「其他公司製造汽車的理念是幫助駕駛員更好地駕駛,而谷歌的理念是製造駕駛水平優於駕駛員的汽車。」拼車出行領域的巨頭——優步公司近期從卡內基–梅隆大學僱用了大量機器人專家,顯然是為了提升汽車的自主駕駛水平。
自2009年以來,谷歌就開始在加利福尼亞的公路上測試自主駕駛汽車,並且聲稱已經完成了數十萬千米的無事故公路駕駛。這些自主駕駛汽車的行駛路線是根據谷歌公司有人駕駛勘查車繪製的地圖確定的,對於這些汽車來說,這些地圖相當於虛擬軌跡(如果沒有這些翔實的地圖,這些汽車根本無法獨自上路)。在進行駕駛測試時,車上坐有人類安全駕駛員和軟件專家,可以打開、關閉自主駕駛系統。谷歌工程師納撒尼爾·費爾菲爾德說:「我們的想法是由人將這輛車開到高速公路上,然後打開這套系統,在旅程的大多數時間裡(也是最無聊的時間)讓汽車自主駕駛,最後再關閉系統。」
在親身體驗了一次之後,《紐約時報》的約翰·馬爾科夫斷言:「從總體來看,用計算機系統來取代人類駕駛員是可行的,這有可能大幅度減少人類駕駛員出錯的可能性。」對於谷歌希望將美國公路交通事故傷亡人數降低至1/2的目標,馬爾科夫可能是持贊同態度的。谷歌公司對這個項目的宣傳折射出軟件系統中常有的硅谷式樂觀主義。該項目的首席工程師、機器人專家塞巴斯蒂安·特倫對未來的自主型系統滿心憧憬:「再也沒有交通事故,也不會發生交通擁堵。」
一些持批評意見的人指出,谷歌的自主駕駛觀點存在局限性。駕駛測試大多是在加利福尼亞北部和西部諸州完成的。在內華達的汽車駕駛測試雖然取得了成功,但在駕駛時谷歌公司設置了嚴格的條件,要求天氣必須晴朗,路線必須簡單易行(谷歌還拒絕披露安全駕駛員關閉自主駕駛系統的詳細信息)。在通過建築工地時,算法難以勝任駕駛員的職能,只能由安全駕駛員來駕駛汽車。不久前,科技記者馬克·哈里斯說,要想成為一名安全駕駛員,可能需要先接受幾個星期的培訓,這說明由計算機駕駛轉變為人類駕駛的過程非常複雜,而且具有危險性。
汽車商業廣告和谷歌駕駛測試的地點都是在廣袤的美國西部,而城市駕駛的情況則截然不同,往往是在混亂、複雜和動態的物理與社會景觀之中穿行,因此會發生大量的社會交互。谷歌承認城市駕駛的難度是公路駕駛的10~100倍。事實再一次證明,有人環境中的問題難度遠遠大於抽像環境中的問題。
麻省理工學院的約翰·倫納德參與過一些無人駕駛汽車的定位和測繪基礎算法的研發工作。他指出,無人駕駛功能可以完成的工作量,取決於社會交互。我的一位已經過世的老朋友、機器人專家賽斯·泰勒敏銳地發現,城市駕駛中包含數以百計的「短時人際社會契約」,例如掃視街道、視線接觸、讓人上車、揮手致謝等。在為物理世界和不同物體分配標籤這個方面,計算機的學習速度比較慢。正如「捕食者」無人機飛行員證明的那樣,以類似方式理解人類身份和意圖的技術仍然比較原始。
倫納德半開玩笑地說,波士頓可以被看作一個極端的駕車環境。他在儀表盤上放置了一個攝像頭,用於收集算法難以處理的駕駛問題,包括在交通高峰期併入一條車流量很大的道路,在灰塵或風雪影響視線的情況下保持在車道內行駛,越過幾個車道左轉彎等。2015年冬,波士頓遭遇大雪天氣。由於道路兩邊堆積了9英尺(約2.7米)高的積雪,而且交通模式也發生了變化,因此,城市駕駛的三維圖像一夜之間就發生了顯著變化。
我們在極端環境中取得的經驗,對未來可能實現的自主型汽車是否有啟示作用呢?在我們研究過的一些環境中使用自主技術時經常會出現一些問題,包括系統故障、用戶技術水平參差不齊、注意力管理問題,以及人們過度依賴自動化系統所導致的操作技能下降與自動化偏見增強的問題,而且所有問題都會對無人駕駛汽車產生影響。
無人駕駛汽車需要面對的最大難題是,自主駕駛與人類駕駛模式的轉換(我們可以稱為「法航447號航班問題」)。在傳感器等部件發生故障,或者現實中出現意想不到的情況時,任何關係到生命安全的系統都必須備有相應的處理辦法。系統越複雜,發生異常情況的可能性就越大。儘管這些異常情況的發生頻率可能非常低,但每天美國人駕車出行的次數超過10億次,是每天起落航班數的10 000多倍。
谷歌的無人駕駛汽車可能會識別無法處理的情況,並發出警報,讓人類駕駛員接管汽車。車上還裝有「自主駕駛故障」指示燈(與現在汽車上長期不亮的「發動機故障」指示燈非常相似,儘管它需要的信息遠多於後者)。如果在汽車高速行駛時,該指示燈打開,那麼我們如何在極短的時間裡做出應對呢?如果擺脫了駕駛疲勞的人正在睡覺或者看書,他能不能迅速進入狀態,躲開迎面駛來的車輛、路面上的凹坑或者剮蹭事故呢?
在遇到這些難以應對的駕駛問題時,無人駕駛汽車的駕駛員也要面對法航447號航班飛行員曾經面臨的挑戰。我們在前面討論過一些身處極端環境的操作人員。與之不同的是,汽車駕駛員接受的相關訓練比較少,而且在身體能力、技術水平以及社會經濟和教育背景等方面,彼此之間的差別非常大。雖然同樣是富有挑戰性的環境,但是深海、天空和外太空等極端環境相對來說比較「乾淨」,而駕駛環境的零亂程度與不確定性都遠超前者。
可能是為了回應這些批評意見,谷歌調整了自己的自主駕駛觀念,剔除了駕駛員這個惹麻煩的角色。工程師納撒尼爾·費爾菲爾德說,谷歌發現「人有懶惰的毛病」,而且「他們的態度多變,從有幾分道理的懷疑到徹頭徹尾的盲目相信,應有盡有」。通過實驗,谷歌認為人類駕駛員不值得信任,無法同軟件密切合作,因此他們把軟件修改為駕駛員零干預模式。據估計,有93%的交通事故是人為過錯導致的,因此谷歌工程師提出了「懶惰的駕駛員」這個說法。(不過,人因專家早就認為人類的過錯常常是系統設計和工作方法欠佳造成的。)
2014年,谷歌推出了新款無人駕駛汽車。從設計來看,這款車似乎對公眾非常友好,而且不會構成任何威脅。為了降低危險性,車速設計得很慢。車上沒有安裝方向盤和儀表盤,也沒有為人類駕駛員提供任何指令輸入渠道。用項目主管克裡斯·烏爾姆森的話來說,谷歌公司的目標是「製造出可以承擔所有駕駛責任的汽車」。這些全自主型汽車將「在無須人類干預的前提下實現安全的自主駕駛」。
這款新車的操作界面只包含點火和熄火這兩個按鈕和一個路線顯示屏。(人們難免會疑惑:駕駛員有什麼辦法可以讓汽車知道目的地呢?)駕駛員變成了乘客,唯一可以做的事情「就是好好放鬆,享受旅程」。費爾菲爾德說:「這款汽車有備用系統,不需要人類駕駛員的幫助。它有兩台轉向電動機。要讓車停下來,我們有很多辦法。」打開YouTube視頻網站上的一些視頻,在輕鬆愉快的音樂聲中,我們可以看到一些盲人、殘障人士和老年人乘坐無人駕駛汽車,沐浴著加州的和煦陽光,在潔淨開闊的道路上縱情享受的情景。
方便殘障人士和老年人出行自然值得稱道,但是谷歌的新方法帶給人們的卻是一種倒退,是錯失良機。具有諷刺意味的是,作為一家高科技公司,谷歌竟然沿用了20世紀的老套辭令,把駕駛員再次假設成為一個被動的觀察者,這不能不說是一種倒退。可以看出,20世紀關於機器人與自動化的三個錯誤觀點在他們的「新」方法上都有所體現:(1)汽車技術必然會朝著徹底自主的方向發展(線性發展觀);(2)自主駕駛系統將把人類駕駛員從駕駛任務中剔除出去(取代觀);(3)自主駕駛汽車可以完全自主地完成駕駛任務(完全自主觀)。
人類在極端環境中的冒險活動告訴我們,在惡劣環境威脅人類生命安全的現實條件下,這種烏托邦式自主是靠不住的。的確,與其說谷歌的烏托邦式自主是一種內涵豐富、以人為中心的自動化,還不如說是一種外強中乾的解決辦法。在自主駕駛汽車裡為人類駕駛員留有一席之地的做法,確實會導致模式混亂、注意力不集中和界面不友好等問題,但是這些問題並不難解決,而且極端環境已經給了我們一些應對之策。然而,谷歌工程師卻選擇了判斷力不足的自動化技術,用谷歌研發的軟件來處理這些問題。這對工程師來說頗具誘惑力,因為把駕駛單純地看作一種導航與避免碰撞的任務,可以幫助他們一勞永逸地規避各種難題。
在一些涉及範圍不大的本地應用中,這種做法也許是可以接受的(跟機場單軌電車非常相似的冷門應用,例如,在停車場和大學校園裡用無人駕駛汽車提供短程運送乘客服務)。但是,作為一種社會活動,駕駛所涉及的內容十分寬泛,在人口構成、經濟、文化等方面變化程度非常大。谷歌甚至無法證明它們的編碼可以識別這些複雜多變的條件。此外,只要有人坐在車中,就會因為危險性、代理關係和可靠性而引發道德風險,需要想辦法解決。谷歌的工程師們一再為自己面對最難的挑戰而感到自豪,但是,在考慮這些意義重大、有益於社會的問題時,他們青睞的解決方法卻是一些有局限性的算法。
當然,即使在谷歌的自主型汽車之中,依然能看到人的「身影」,只不過人的存在方式在時間和空間上發生了某種變化。具有明顯自主性的編碼其實是人編寫而成的,而且人對這些編碼的影響非常深遠。我們深入研究一個算法的內部運行機制,以充分瞭解這個特點。請大家回想一下2007年的美國國防部高級研究計劃局(DARPA)大獎賽。在這一年,DARPA贊助的這項賽事第一次記錄了發生於自主型汽車之間的碰撞事故,賽事催生的幾項技術還成為谷歌汽車的基礎性技術。谷歌的克裡斯·烏爾姆森是獲勝隊的首席工程師,谷歌團隊的其他幾名成員當年也參加了這項比賽。
事故發生時,麻省理工學院的賽車「塔羅斯」正在超越康奈爾大學的賽車「天網」。當時,「天網」的路線規划算法出了問題,正在路邊以很慢的速度斷斷續續地前進。「塔羅斯」上的車載電腦沒有把「天網」判定為正在行駛的汽車,而是把它歸類為「一堆靜止物體」,於是加速從「天網」前面超車。但是,「天網」並不是靜止的,而是以「塔羅斯」未識別出的方式慢慢地前進。在「塔羅斯」快速併入「天網」所在車道時,「天網」突然加速,以致與「塔羅斯」撞在一起。結果,這兩輛車都沒有贏得比賽。
值得讚賞的是,兩支隊伍進行了會商,並公開了碰撞事故的詳細情況。事故原因涉及無數算法和傳感器,但關鍵原因在於麻省理工學院的賽車沒能判斷出康奈爾大學的賽車是一個正在運動的物體,而且佔據了後者的前進路線。令人意想不到的是,麻省理工學院代表隊認為詳細識別物體(是「車」還是「護欄」)的算法容易導致錯誤而放棄使用它,並採用了只能將物體區分為運動的物體和靜止的物體的算法。但是,在分析汽車傳感器探測到的物體時,速度數據中包含隨機噪聲(所有數據都有這個問題),因此麻省理工學院的自主型系統以每秒3米的速度作為閾值,對數據加以篩選。運動速度快於這個閾值的任何物體都被視為「運動的物體」,反之,則被視為「靜止的物體」。
這個閾值是如何設定的呢?它是由一位工程師估算靜止與運動物體之間的差值得來的。我問瓊恩·豪(該項目的主要參與者之一),在類似系統中,這樣的閾值有多少個?他回答說:「有很多。」事實上,麻省理工學院賽車的「配置文件」包含近千行文本,設定了數百個變量,包括傳感器的設置和校準,使傳感器相互之間密切配合的附加因素,如何處理陽光眩目的問題等。機器學習技術可以減少對這些參數的依賴程度,但仍然需要人類程序員為它們搭建基本結構。豪說,在一般情況下,核心算法對現實世界中不確定因素的準確模型的依賴程度非常大。他認為:「自主技術從本質上看就是不確定世界中的生活起居問題。」
對早期自主型汽車的編碼稍加研究,我們不難發現這些「自主型」汽車裡富含大量人為的判斷,其中有無數微不足道的細節內容(例如,上文討論的閾值),也有意義深遠的深奧內容(例如,不確定因素的模型)。再回想一下,我們最初把自主技術理解成一堆管線,在接收傳感器的輸入資料之後,將它們轉換成目標明確的行為。技術的確非常神奇,但是那些管線和轉換過程離不開人的設計。
將這些神奇技術應用到汽車這樣的裝置上,卻有可能給你帶來致命危險。
目前,律師和法學學者正在考慮無人駕駛汽車是否涉及法律責任問題。如果你把自主性理解為汽車的自作主張,那麼構成責任的意圖鏈就會斷裂。如果你的谷歌汽車載著你掉進水溝,誰應當為此負責任呢?僅憑律師起草的合同是解決不了這個問題的,因為它涉及對自主性這個基本概念的理解。如果系統真的是在自主運行,那麼出現問題之後,怎麼會是製造商的過錯呢?(有人認為,傳統的產品責任認定方法同樣適用於這個情況,即公司必須為它製造的產品負責。)更具有實際意義的問題是,人們如何證明自主型汽車上安裝的軟件是安全的呢?
在飛機等關乎人的生命安全的計算機系統上驗證軟件的做法有很強的說服力,但是操作起來有很大的難度,而且成本非常高,因為測試必須縝密精確,每個可能涉及的編碼至少測試一次,還需要小心控制各種變化。這些標準同樣可以用於驗證人為的過程,包括根據嚴格的要求計劃、設計和編寫該編碼的過程,以及編碼發佈之後的質量保證與升級管理等過程。但是,這些程序當前的形式並不適用於那些完全自主的系統,因為後者可能採取的行動方案有無數個。而且,與航空上應用的合成視景系統一樣,以谷歌汽車為代表的自主型汽車必須依賴於數據高度完整而且頻繁升級的數據庫。錯過一次升級更新,自主駕駛汽車就有可能一頭撞到建築工地或者雪堆之中。
我們如何驗證谷歌為不確定因素和危險性建立的模型呢?所有的路徑規划算法都會包含這些未知因素。路徑規劃是通過優化「成本函數」(cost function)來實現的,也就是不斷地回答「從這裡到那裡,怎麼走才能把『成本』(用時間、能源、危險性等變量表示)降至最低?」這個問題。但是,成本函數本身體現的就是人在輕重緩急程度上做出的判斷。如果孩子坐在後排座位上,你在駕駛時就有可能趨於保守。此時,成本函數就應該將安全性至於速度之上。如果你是獨自一人,又要趕時間,那麼你可能會開得更快一點兒,危險性就會增加。如果你覺得汽車最近的油耗比較高,你就會更加關注燃油效率的問題。
我們再做一個思維實驗,考慮你的自主型汽車上是否應該配備一個「危險性」手柄。希望早點兒回家?就把危險性手柄向上推一點兒。此時,系統選擇的駕車方式就會更冒險,你到家的時間會更早,你的賬戶也會被自動扣除更多的保險費用。(因為你讓其他駕駛員置身危險之中,你對他們有什麼補償呢?你是否應該幫助他們支付部分保險費呢?)孩子坐在汽車後排座位上?那就把危險性手柄向下拉,更嚴格地遵守交通法規吧。
只要坐到方向盤後面,我們就會有意無意地做出這些決定。而在駕駛谷歌的自主駕駛汽車時,坐在某個小隔間裡的工程師會代替我們做出這些決定。如果不希望被軟件代勞,我們就需要有一個操作界面。附近區域的地圖突出顯示危險時,整個地圖會變成什麼樣?那些三維「自主性雲團」何時會顯示出來呢?
這些思維實驗幫助我們找到了谷歌自主駕駛汽車的替代方案:不是剔除駕駛員這個角色,而是重新思考人類的角色定位。激光掃瞄周圍景觀形成的圖像有一種朦朧感,非常迷人。由於這些圖片可以顯示自主型汽車的內部模型,從而為一種新的界面、新的駕駛體驗奠定了基礎。我的同事比爾·米切爾曾經反覆強調:「儀表盤作為一個界面,它所連接的應該是城市,而不是汽車的引擎。」
從此以後,我們再也不用想著要保持在自己的車道裡開車、控制車速,以及那些令人身心俱疲的反饋回路了。現在,我們的責任是監督,在較高的層次上指揮和控制汽車的行為,但我們也可以親自掌控方向盤。我們利用大量通過傳感器和算法加強的環境模型,駕著車從一個個「自主性雲團」和「危險性雲團」中駛進駛出,整個系統的自主程度也在不停地發生變化。
這個目標的現實不能一蹴而就,但是,解決這個問題的可能性遠大於將希望寄托於烏托邦式的完全自主型汽車。我們應該有能力幫助那些老年人和殘障人士,在駕駛的同時完成其他任務(諸如發短信、閱讀等),在繼續保持人類臨場體驗的同時,還可以增強安全性。
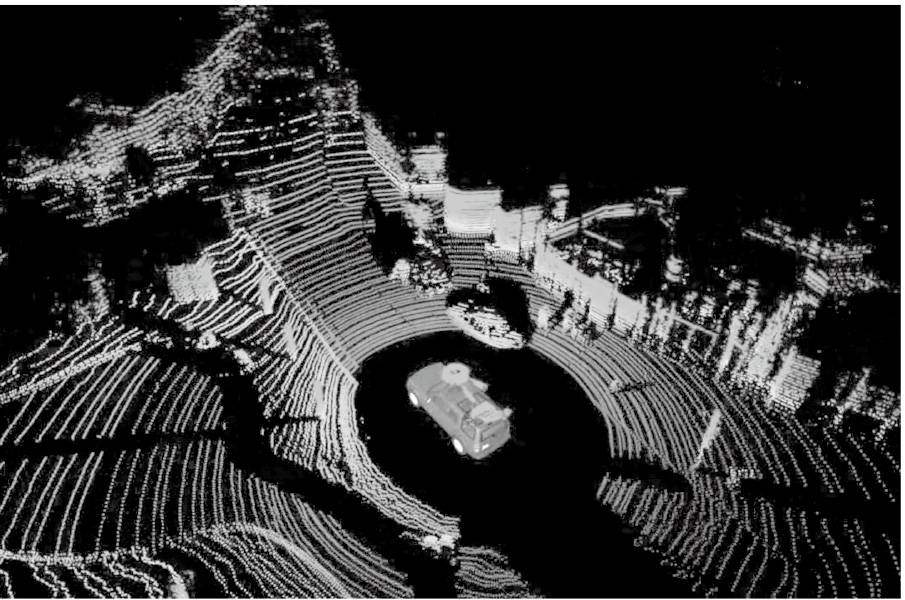
圖6–2 早期無人駕駛汽車的監控顯示器屏幕截圖。圍繞汽車的圓圈表示激光雷達正在掃瞄道路以及路邊樹木。隨後,算法對這些數據進行篩選、分類,為汽車規划行駛路線。這種圖形是否有可能作為操作界面,從而催生出一種新的駕駛方式呢
圖片來源:麻省理工學院的愛德華·奧爾森。
谷歌在自主型汽車上的研發目標以及宣傳辭令經常發生變化,在快節奏的公共傳播環境中有可能會再次發生變化。這有可能說明谷歌工程師團隊的成員在願景展望方面產生了分歧。不過,谷歌在文化上對不同意見進行了約束,從美國國家立法機構到汽車經銷商都受到了影響。除此以外,美國國家公路交通安全管理局和美國汽車工程師協會對自主程度的界定都被打上了線性發展觀的烙印。它們或者直言不諱,或者含糊其辭,但兩者都認為通過一系列的進步,最終必然會實現「完全自主」。兩個機構制定的標準都沒有明確說明可以採用混合模式,比如,規定某些任務可以實現高度自動化,而其他任務則需要慎重考慮;也沒有明確說明可以採用信息豐富的自動化模式,讓人也能參與駕駛活動。
對於本來可被視為獨立發明的谷歌無人駕駛汽車而言,阻礙它順利發展的責任、認證和風險問題並不是偶然發生的「社會」問題,而是自主問題的重要組成部分,對未來的機器人以及人類的發展前景都有著重要的約束作用。這不是技術性問題,而是事關誰擁有控制權的問題。不過,谷歌汽車的支持者們沒有注意到這個問題,科技界的許多人也對其視而不見。
最後,我列舉兩個仍處於發展初期的項目作為這個替代方案的具體事例。這兩個項目都希望加強用戶的作用,幫助用戶更好地瞭解自主技術。從一開始,他們就致力於打造一種人–機合作的團隊關係,而不是設計一種無須用戶參與任務適應的高度自動化的機器。
一架無人駕駛直升機高速接近著陸地點。在用激光掃瞄儀(與谷歌汽車頂部的激光掃瞄儀非常相似)掃瞄周圍的地形之後,該直升機將採集到的數千個測量結果輸入計算機,為正在實時構建的一個數字三維地形模型提供所需的數據。接著,模擬程序利用複雜的算法處理這些數據,並按照模型給出的航徑模擬接下來的飛行。這些程序可以識別平坦的地形,然後判斷空間是否足夠大,直升機降落時是否會撞到樹木、電線或者其他障礙物。程序還會分析著陸區域是否足夠平整,確保直升機在落地時不會翻。
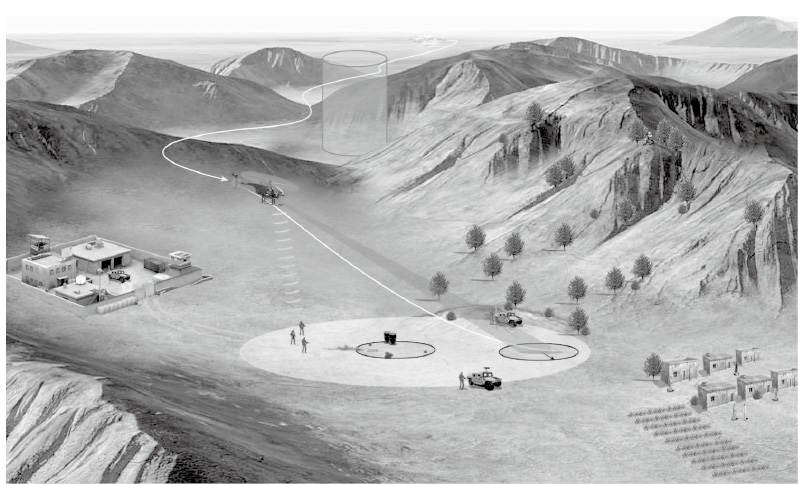
圖6–3 自主空中貨運通用系統項目(AACUS)中的自主型直升機為投送物資或者執行醫療後送任務,而在山區掃瞄、選擇著陸地點並完成進近的情況。地面上的著陸支持專員通過蘋果平板電腦界面和無線電鏈路同直升機交互並確定著陸地點。
圖片來源:極光飛行科學公司。
直升機在接近著陸區域時,樹木會阻擋視線。依靠激光掃瞄儀,計算機發現在稍微偏右的樹木之間有一個間隙可以通過,從而在樹木中間規劃出一條路線並指揮直升機著陸。
以上是某個真實項目的一個演示圖例。作為某個政府研究項目的一部分,坐落在美國弗吉尼亞州馬納薩斯的極光飛行科學公司製造了一架全尺寸自主型貨運直升機,並於2014年2月完成了一次飛行演示。該政府研究項目的目的是安排無人駕駛直升機前往危險區域完成物資投送以及可能的傷員轉移等任務,避免飛行員涉險。我是該項目的成員之一,設計了人與自主程序進行交互的概念結構。我們的理念是把自治系統視為人–機團隊的一部分,不僅在設計操作界面時如此,在設計核心算法程序時也秉持著這個理念。
在這次演示之後,《華爾街雜誌》報道了這個項目,標題是:「海軍給無人機裝上了大腦」。似乎在媒體的眼中,完全自主的神話美輪美奐,沒有一點兒瑕疵。
那麼,人是否參與其中了呢?事實證明,人參與了這次演示的全過程。由於這架直升機是原型機,因此機上還有一位安全飛行員。他雙手抱臂坐在那兒,眼睛看著計算機顯示屏。不過,他必須隨時做好準備,一旦接到通知,就要迅速關閉計算機,接管飛機。等到技術成熟後,就會徹底摒棄安全飛行員這個角色。但是,儘管我們認為安全飛行員是一個多餘的角色,實際情況卻有可能並非如此,只不過他們需要從事一種全新的工作。
更重要的是,在直升機著陸時,還有人在著陸區等待著直升機的到來。畢竟,如果沒有人(甚至是一群人)卸貨、打開包裝並消耗掉直升機運送來的物資,物資運送又有什麼意義呢?站在野地裡迎接這架直升機的這些人,必須有極大的勇氣,對直升機有充分的信任,因為在一架由軟件控制的直升機向你飛來的時候,要保持輕鬆愉快的心情並不是一件容易的事。我們的團隊採訪過幾十名著陸區引導員,這些為了生計去做有人駕駛直升機降落引導的人大多有在伊拉克和阿富汗工作的經歷。其中有幾個人回憶說,他們抬頭仰望,看見無人駕駛直升機在頭頂盤旋時,心裡有一種不自在的感覺,因為他們不知道這些飛機歸誰所有,也不知道它們在執行什麼任務。在戰爭期間,他們最不希望引導那些「安裝有大腦的無人機」著陸,最喜歡的合作對像則是那些老老實實地執行命令的直升機。
也就是說,在著陸區等候的這個人必須有拒絕直升機著陸的權利。因此,我們為他準備了一台蘋果平板電腦。經過幾分鐘的培訓,他(她)就可以與直升機進行簡短的談判。這個人會建議一個著陸地點,如果計算機認為這個著陸地點不能滿足安全需要就會拒絕接受這個建議,並給出若干個備選地點。這個人要麼接受某個備選的著陸地點,要麼要求直升機復飛。
事實證明,設計這個談判(操作界面和軟件系統需要在1分鐘之內完成談判,自主技術必須易於被人理解)是整個項目中最富有挑戰性的任務。
不過,直升機的成功演示給人類飛行員提出了一個疑問:如果掃瞄儀和算法真的可以準確選定著陸地點,人類飛行員是否希望在飛機上加裝這套系統?隨著這個項目不斷取得進展,這些自動化功能不僅會被安裝到無人駕駛直升機上,還會被安裝到有人駕駛直升機上。舉個例子,在我們社區裡執行醫療運送任務的直升機往往需要在極端困難的條件下降落到充滿不確定因素的環境。我們已經開始研究利用這些新式傳感器和算法,幫助人類飛行員提高飛行操作的技術水平和安全性。
這些想法有的已經被應用到一種叫作「非強制性無人駕駛飛機」(OPA)的新式飛機上。《航空航天技術週刊》(Aviation Week & Space Technology)是航空航天領域的一家有影響力的雜誌。幾十年來,該雜誌一直在刊登新式飛機的「飛行員報告」。2012年,該雜誌刊登的飛行員報告介紹了一架名叫「Centaur」的飛機。在整個試飛過程中,飛行員從頭到尾沒有觸碰過任何控制裝置。
在試飛過程中,報告人坐在這架小型雙引擎飛機的後排座位上。坐在他前方的安全飛行員心情平靜,雙手放在大腿上。在他的旁邊,也就是通常情況下副飛行員的位置上,是一系列經過精心設計的鏈路、激勵裝置和伺服系統。安全飛行員拉動一個控制桿,機械裝置就會咬合,並代替飛行員操縱飛機的操縱桿和踏板。如果飛行中出現問題,安全飛行員輕輕拉一下控制桿,就可以鬆開機械裝置。在正常情況下,他不需要觸碰任何控制裝置。

圖6–4 極光飛行科學公司製造的高度改良型雙引擎通用航空飛機「Centaur」號非強制性無人駕駛飛機。「Centaur」號無人機可以由坐在前排的飛行員駕駛,也可由在地面上或者坐在後排座位上的人通過相同的電腦界面遙控駕駛
圖片來源:極光飛行科學公司。
坐在駕駛艙後排座位上的「操作員」通過筆記本電腦操控飛機,他使用的操作界面與無人駕駛飛機地面控制台的界面完全相同。他可以通過電腦顯示屏指揮飛機完成改變飛行高度、朝向航點飛行以及起飛、降落等動作。按下「啟動」按鈕就可以激活自動起飛程序。電腦先保持制動狀態,將油門桿向前推,在檢查引擎和儀表之後,鬆開制動,飛機開始滑行。隨著飛機加速、升空、爬高,半自主型飛行就這樣開始了。
作為非強制性無人駕駛飛機,「Centaur」號(得名於神話中的人首馬身的怪物)可以像剛出廠的新飛機一樣通過註冊認證,以有人駕駛的方式完成正常的飛行;也可以採用半自動飛行模式,由坐在後排的報告人通過筆記本電腦指揮飛行;還可以採用無人駕駛模式,由地面人員通過無線鏈路操縱相同的電腦界面指揮飛行。
這架非強制性無人駕駛飛機是極光公司工程師利用市面上商業銷售的鑽石DA–42飛機改裝而成的。工程師們在前座上加裝了機械裝置和一堆獨立的電子元器件,並將飛行手冊和應急程序進行了數字化,編入計算機算法。
在美國領空,無人駕駛飛機大多是不合法的,但是「Centaur」號無人機得到了美國聯邦航空管理局的許可,在飛機上有安全飛行員的前提下可以採用無人駕駛模式。因此,這架飛機有助於無人駕駛系統所需傳感器、算法和程序的研發工作。在有飛行員登機的情況下,該飛機已經獲准前往阿拉斯加州,通過無人駕駛操作採集氣象研究所需數據。
「Cenaur」號無人機採用的是適合飛行測試和工程研製的過渡技術,相關規章制度和具體技術還在制定當中。不過,這套技術卻為新的飛行方式播下了種子,因為即使是在美國的領空,安全飛行員的職責最終也可能變成通過筆記本界面操控無人機飛行。
我們是不是很快就可以看到沒有飛行員的客機呢?在可以預見的將來,這個目標可能還無法實現,但是通過「Centaur」號無人機,我們可以瞭解人類現在已經掌握了哪些相關技術。從技術上看,控制飛機滑行、指揮飛機起飛、按航線飛行和自動著陸的自動化技術都已經得到了驗證。無人駕駛飛機的問題似乎已經解決,只不過都是在無人環境下解決的。我們再一次發現,全自主型操作不是大問題。我們可以認為人類現在已經掌握了這方面的技術,但是如何讓這個創新發揮社會意義,如何讓它為人類福利做出貢獻,則是一個尚未解決的問題。要解決這個問題,不僅需要製造出這些機器,還需要社會、政治和經濟體系允許這些機器融入人類的生活。
客機必須經過安全認證,以確保它不會從空中墜落。它們不僅需要向乘客提供安全性統計數據,還要提供安全體驗;不僅需要應對我們可以想見的所有緊急情況,還需要確保在發生無法預見的緊急情況時不出問題。在涉及責任、危險、可靠性和信任等因素的有人環境下,同無人駕駛汽車一樣,無人駕駛飛機所面臨的問題同樣沒有得到解決。只有通過演示、操作和智能工程反覆驗證這些系統的可靠性,多年之後,人們才會慢慢地信任和接受它們。
我們更有可能看到的變化是機組人員的數量將會減少,而且這個變化肯定為期不遠。在長途飛行中,即使在枯燥乏味的途中飛行時,飛行員也需要換班。因此在正常情況下,長途客機需要安排三名以上的飛行員。如果在保證安全性不受影響的前提下,可以減少機組人員的數量,將對航空公司的運營成本產生直接影響。
問題是大型客機不允許單飛行員操作。作為昂貴的資本設備,大型客機仍將以現有的操作形式陪伴我們度過未來幾十年的時光。因此,要減少機組人員的數量,我們必須安裝一些內設裝置。這些裝置不僅需要像人一樣能與飛機進行交流,還要與飛行員進行有效的溝通。如果用機器取代長途飛行中的副飛行員,這台機器可能只需要監控和防範緊急情況的發生,在出現問題時要臨時應對一段時間,以便喚醒正在打盹兒的飛行員,並讓他(她)瞭解飛機當前的狀況。當然,這樣的機器應該通過「法航447號航班」突發性預警的檢驗。可是,有時候人類也無法通過類似檢驗。(最近發生的3·24德國之翼航空公司墜機事件表明,如何防範飛行員自殺毀機的行為是一個極具挑戰性的社會問題。)
如何以較低成本在任意飛機上快速添加自動化功能,這是一個比較難的挑戰,美國國防部高級研究計劃局(也是上文中提到的早期無人駕駛汽車大獎賽的資助機構)已經放棄了這方面的努力。如果有人希望安裝這項技術,可能還需要在多個方面對飛行員提供支持,包括執行常規任務、查看程序、訪問過往事件數據庫、針對飛行操作給出有用的建議等。為了不重蹈覆轍,這項技術不是用來完成副飛行員的工作,而是通過飛行員與助手之間的新式勞動分工,讓人與機器充分發揮各自的作用。美國國防部高級研究計劃局正在資助一個名叫「機組人員駕駛艙工作自動化系統」(ALIAS)的項目,希望通過該項目認真考慮這個問題並完成樣機的製作。如果成功,這個項目不僅有可能以上述方式扮演副飛行員的角色,還有可能將任意一種飛機變成無人駕駛或者遙控駕駛飛機。
ALIAS項目希望在副飛行員的座位上安放某種裝置,讓它像人一樣與駕駛艙進行交互——通過機器視覺閱讀儀表盤上的數字,並通過飛行控制裝置操控飛機,甚至扳動、掌握整個駕駛艙裡的所有開關和操縱桿。
ALIAS項目設立了多個彼此之間有重疊的目標,其中最遠大的一個目標可能是通過「微創手術」將任意飛機(包括大型運輸機和直升機)變成自主機器人。通過合適的數據鏈路,安裝有ALIAS系統的飛機可以實現遠程操控。該項目的一個短期目標是將ALIAS系統用作「飛行員助手」,在工作負荷較高的時段幫助處理常規任務(就像《星球大戰》中輔助盧克的小型機器人R2–D2)。這樣,人類飛行員就可以坐在前排座位上,通過類似於蘋果平板電腦的界面,操控飛機完成整個飛行任務。
「飛行員助手」有助於減少長途飛行中機組人員的數量。ALIAS項目的作用不是取代副飛行員,而是重新思考飛行員與副飛行員之間的關係,也就是重新思考駕駛飛機這個基本任務。在看到完全自動化的客機之前,我們將在很長一段時間裡看到依賴於ALIAS項目及類似技術的飛行方式,而且這些飛行方式可能最先應用於貨機的長時間水上飛行。
極光飛行科學公司的團隊拿下了設計、建造ALIAS項目的合同(我是該團隊的一名成員)。ALIAS項目將利用機器學習技術適應新飛機,利用機器視覺讀取、理解駕駛艙顯示屏的讀數,還會利用某些機器人激勵裝置操控各種控制裝置和開關。在適應新飛機時,需要對ALIAS項目進行培訓,包括基本飛行操作與程序,「觀看」人類飛行員的操作,收集人類飛行員駕駛飛機的相關數據。團隊還希望將最優秀飛行員的飛行技術編成計算機編碼。
不過,ALIAS項目面臨的主要難題並不是算法,而是如何與人類夥伴合作的問題。民用航班的經驗告訴我們,所有駕駛艙根本不需要再增加一個界面複雜、內部狀態無從瞭解而且令飛行員迷惑不解的「黑盒子」。因此,這個難題就變成了如何重新思考飛行員的任務,並在不過分增加複雜性的前提下提升他們工作的抽像程度,也就是說,我們需要重新思考飛行員的角色。
飛行員在飛行時,可以今天採用有人駕駛模式,明天採用遙控模式,後天採用自主飛行模式。而且,人類飛行員可以選擇讓ALIAS操控飛機一個小時,隨後以手動方式駕駛飛機。採用ALIAS以及類似系統之後,飛行員甚至可以在長途飛行中睡覺,前提條件是他(她)可以證明系統在發生緊急情況時能應付足夠長的時間,使他(她)有時間清醒過來、瞭解情況並在必要時介入飛行。事實證明,允許飛行員打盹兒可以緩解疲勞,使他在駕駛飛機時有更好的表現,但這要求我們修正對飛行員的認識,不再把飛行員視為在整個飛行過程中一直全神貫注地操控飛機的英雄,而是把他們看作極其能幹但是在認知與心理方面存在局限性的人。
同美國國防部高級研究計劃局的其他項目一樣,ALIAS項目也是一個充滿不確定因素的高風險項目,人們並不清楚它最終能否(以及如何)付諸應用。但是,作為一個研究項目和一個高級的思維實驗,它為我們指出了幾十年以來我們一直在努力學習的一個道理:展現在我們眼前的根本不是由載人飛機演變為遙控飛機,進而演變為自主型飛機的線性發展過程,而是一種趨同現象。載人、遙控和自主技術共同演化,彼此之間的界限逐漸模糊。